PowerBarry the FlowerMermaid
Welkom op de site van WB-14. Met trots presenteren wij onze grijper. De grijper genaamd PowerBarry the FlowerMermaid kan gemakkelijk met hoge snelheid je vriendin versieren door een bloemetje voor haar op te pakken, mits het werkframe in een weiland staat en niet in de Assemblagewerkplaats . Tevens kan hij haar make-up vasthouden als ze even aan het bellen is. Voor de rustige levensgenieters kan hij ook je rug strelen door soepeltjes zijn klauw van boven naar beneden te manoeuvreren.
Verder kan hij voor de uitermate luie mensen, die geen zin hebben om een bekertje 25 cm (maar liefst 0,25 meter) omhoog te tillen, het werk overnemen.
Voor de mensen die nu denken: ´Wauw, wat een mooi ding´, er is meer! Op deze site presenteren we niet alleen de grijper in ´the mister steal your girl modus´*, ook presenteren we de ontwikkelingen in ons proces, handschetsen van onze verschillende ideeën en onze verschillende criteria en oplossingen voor de grijper.
*Het kan zijn dat de grijper in ‘the mister steal your girl modus’ van de site verwijderd is, in verband met leeftijdseisen, door het vertonen van seksuele verhandelingen die schadelijk kunnen zijn voor kinderen.
Wees gewaarschuwd, het overmatig gebruik van hoeken van dertig graden in de tekeningen kan hart- en vaatziekten veroorzaken. Gebruiken op eigen risico.
Opdracht
Ontwerp een mechanische grijper die een standaard koffiebekertje met een massa van maximaal 0.5 kg waarvan de inhoud kan verschillen minimaal 25 cm op kan tillen. De inhoud moet tijdens het optillen in het bekertje blijven. Daarnaast moet de grijper met het bekertje minimaal 10 seconde in de hoogste stand blijven staan. Aandrijving is door middel van 3 actuatoren.
Schetsen
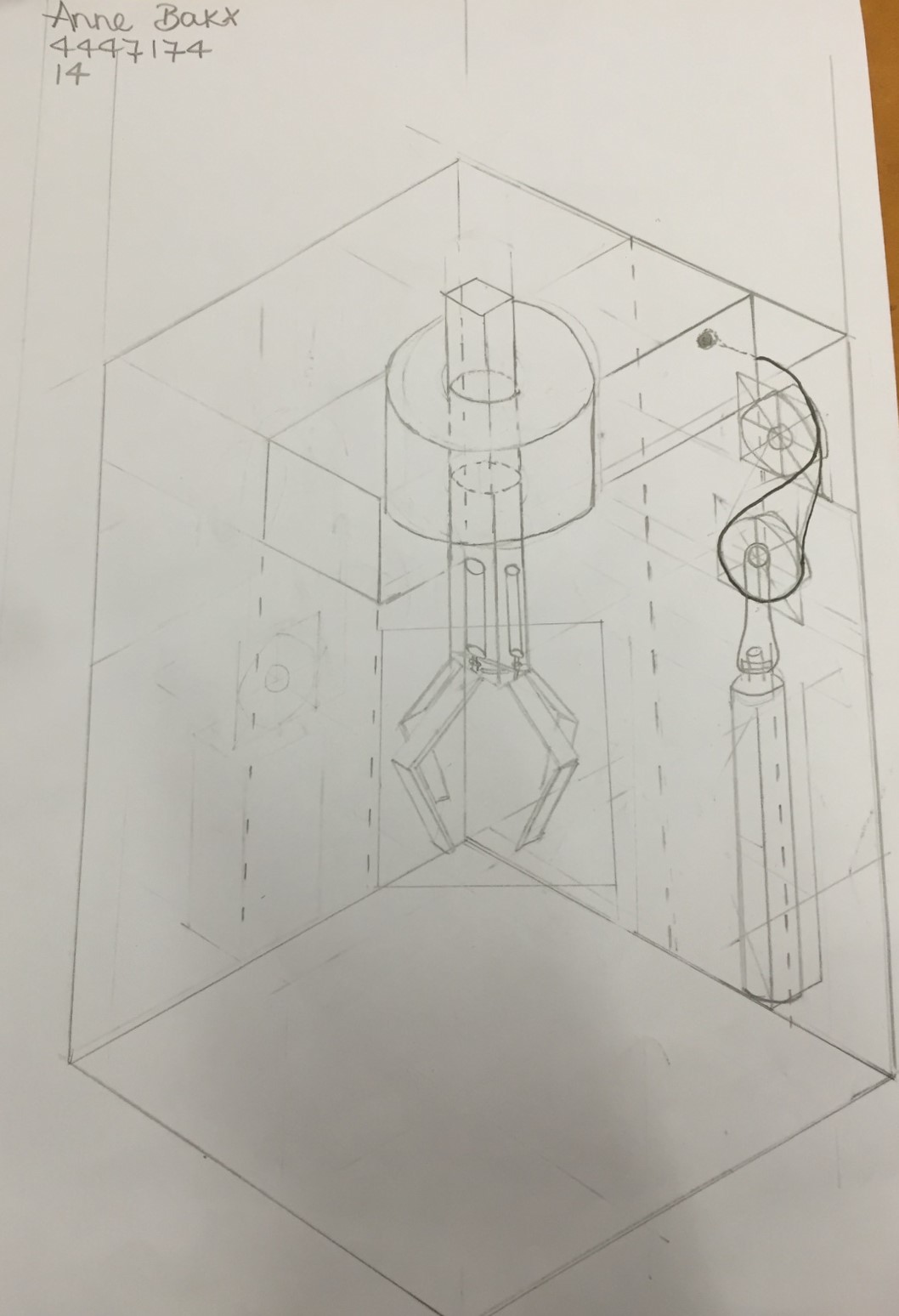
Schets Anne
In deze schets zie je een grijper die omhoog en omlaag gaat door de kracht van een actuator die wordt versterkt door katrollen. De Vingers van de grijper worden ook aangedreven door een actuator. Bij deze vingers wordt er ook gebruik gemaakt van veren om de kracht gecontroleerd te laten werken
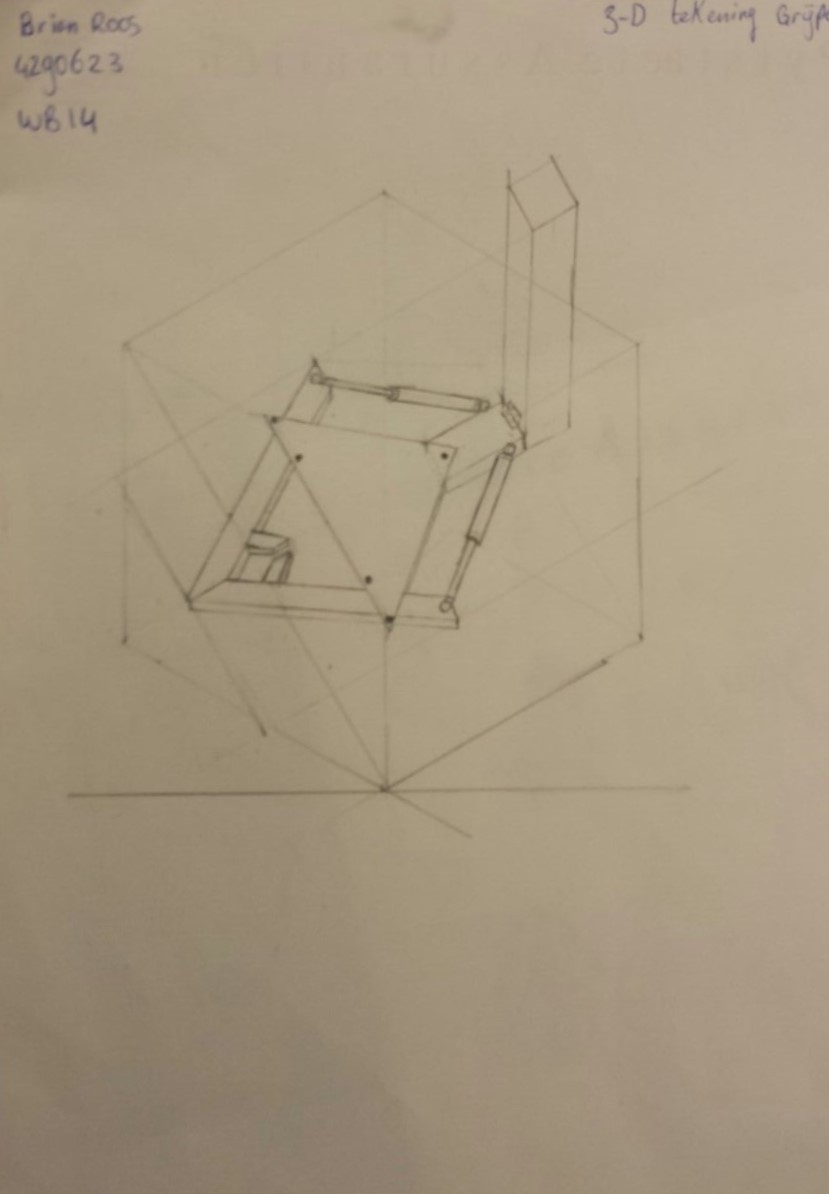
Schets Brian
In dit ontwerp is met name de grijper in detail uitgewerkt. De grijper bestaat uit twee vingers, met een vertakking aan het eind voor extra grip, die beide bevestigd zijn aan een actuator die doormiddel van luchtdruk in- en uitschuift. In de schets is de grijper getekend in de dichte stand met de actuatoren helemaal uit geschoven. Het mooie aan dit ontwerp is de eenvoudigheid van de werking en de vertakking van de grijpvinger die versteld kan worden om verschillende maten objecten te kunnen pakken.
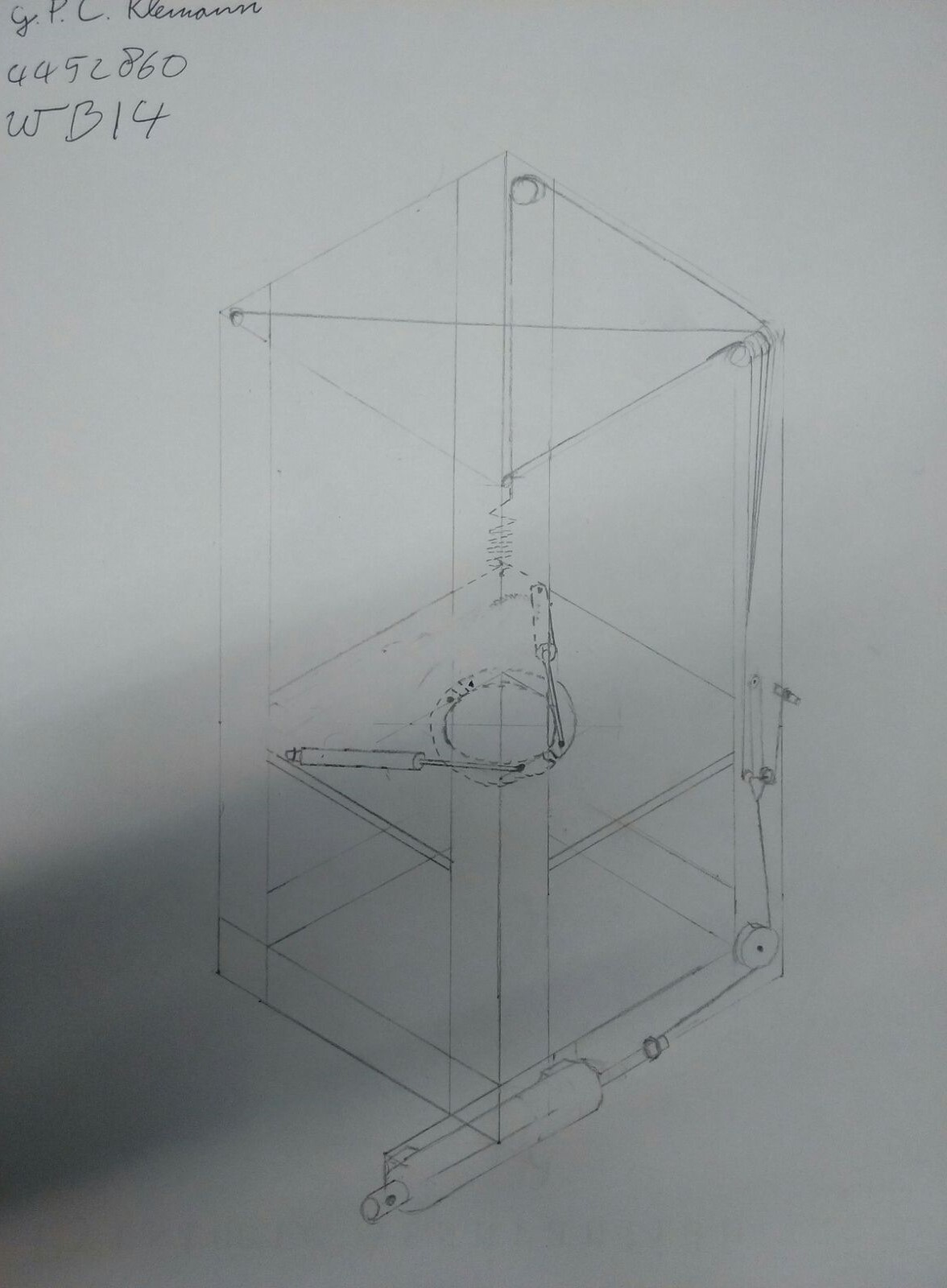
Schets Gijs
In dit ontwerp is een liftschacht met daarin een plateau te zien. Aan de zijkant van de schacht zit de grote actuator die via een pullie systeem verbonden zit aan het plateau en tilt deze aan de hoeken op met veren er tussen om de klap op te vangen. Op het plateau zitten twee halve circels die om het bekertje grijpen en de twee kleine actuatoren die deze open en dicht doen.
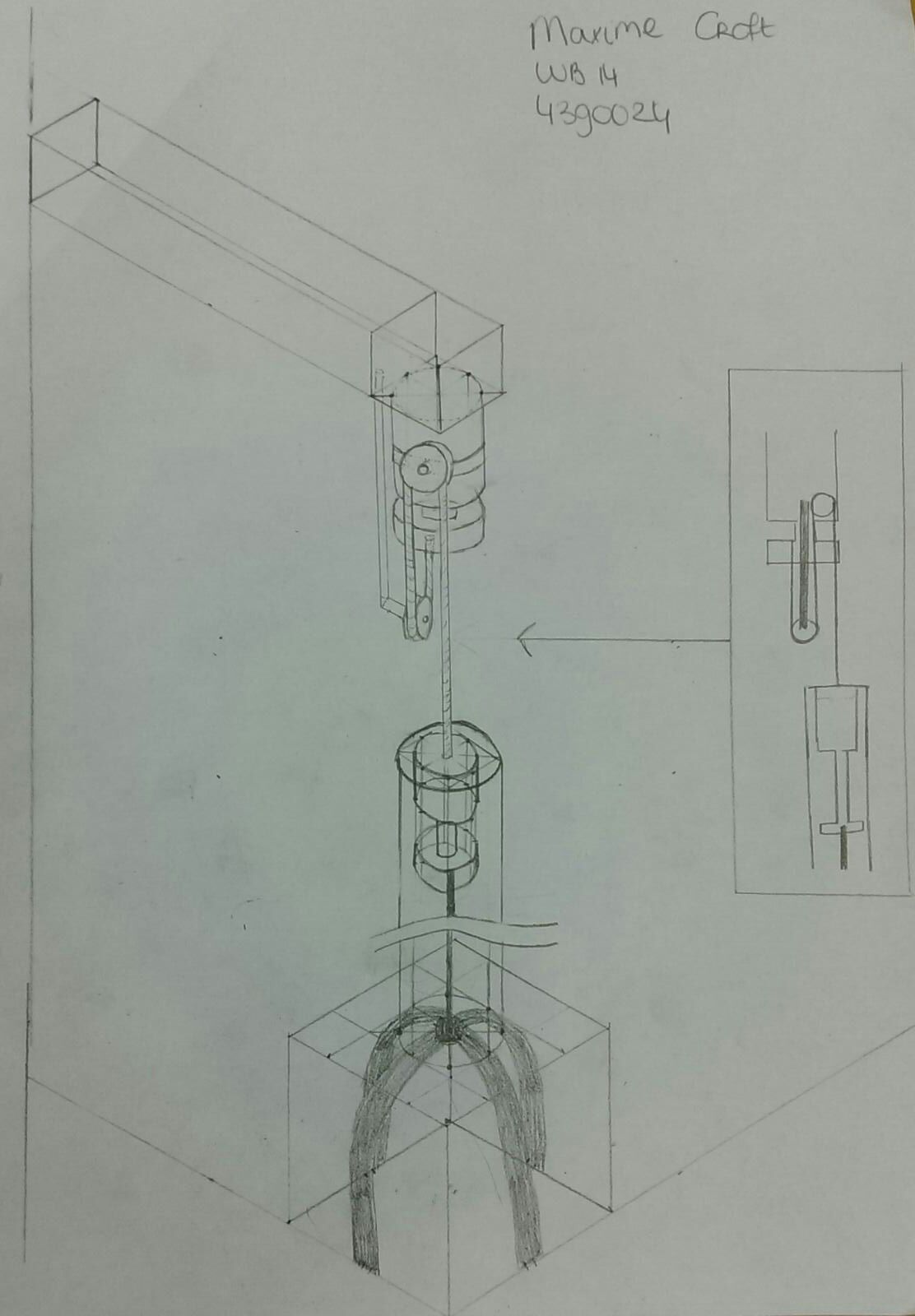
Schets Maxime
Deze grijper kan omhoog en naar beneden door de grote actuator in en uit te schuiven. De grijper hangt aan de grote actuator met behulp van een touw en een katrollensysteem. Door dit katrollensysteem zal de grijper 20 cm naar beneden gaan, wanneer de actuator 10 cm uitschuift. In de onderste uiterste stand is de kleine actuator die in een buis zit uitgeschoven. Aan deze actuator zit een touw en daaraan zit een grijphand. Door de actuator in te laten schuiven wordt de grijphand deels de buis ingetrokken. Hierdoor wordt het bekertje vastgeklemd tussen de vingers van de grijphand en wordt het bekertje al voor een deel opgetild.
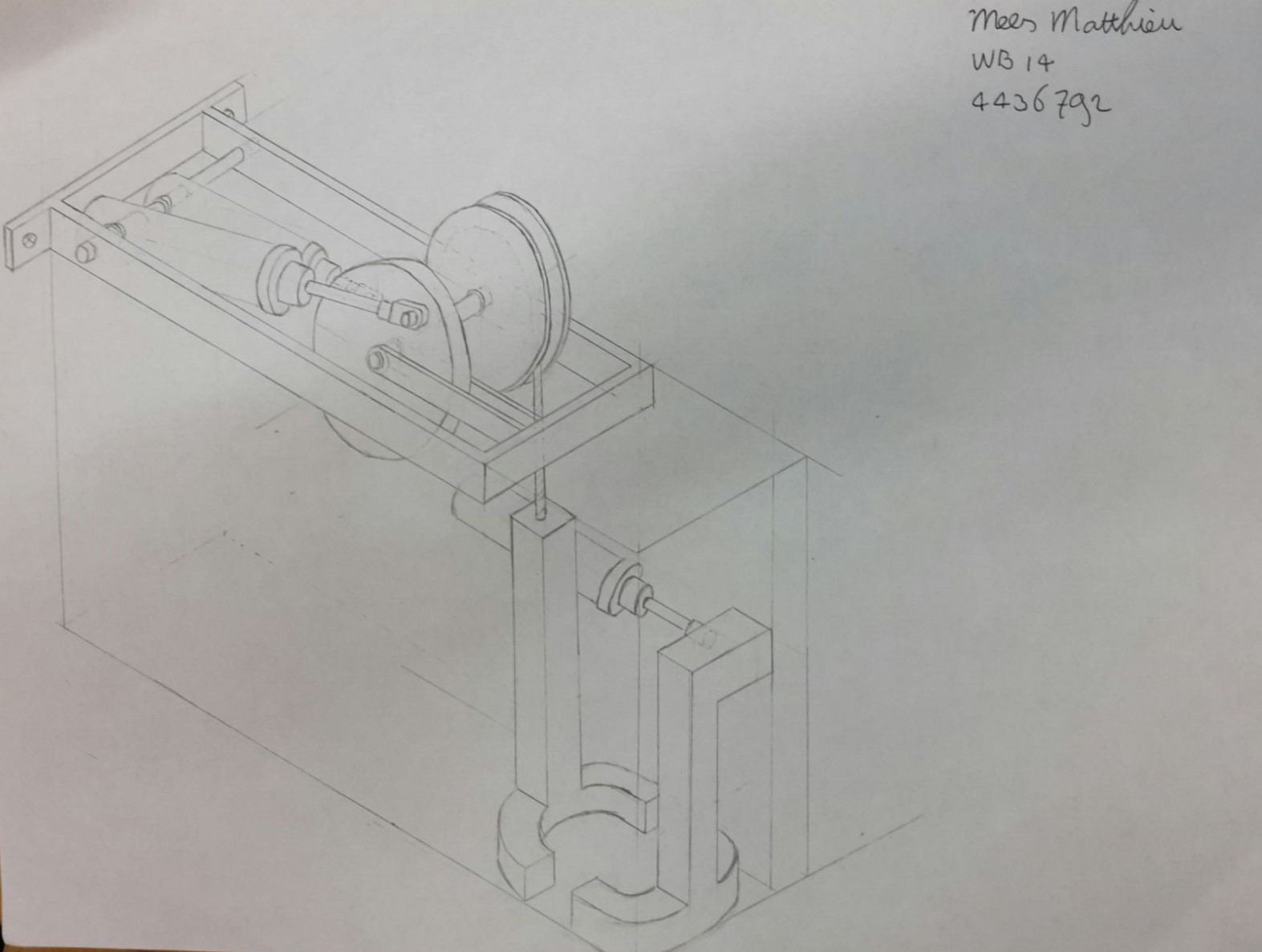
Schets Mees
De grijphand kan naar boven en beneden bewegen door middel van een krukas-systeem. Twee actuatoren drijven de krukas aan, door in en uit te schuiven. De krukas gaat hierdoor roteren. Door de rotatie, draait het touw om de as, waardoor de grijphand omhoog transleert. De grijphand kan omlaag transleren door de actuatoren precies de andere kant op in of uit te schuiven.
De grijphand kan bekertjes oppakken door middel van twee halve cirkels. De grijphand werkt door de actuator in te schuiven, waardoor de halve cirkel naar de andere halve cirkel beweegt. Hierdoor wordt de beker omsloten door de twee halve cirkels.
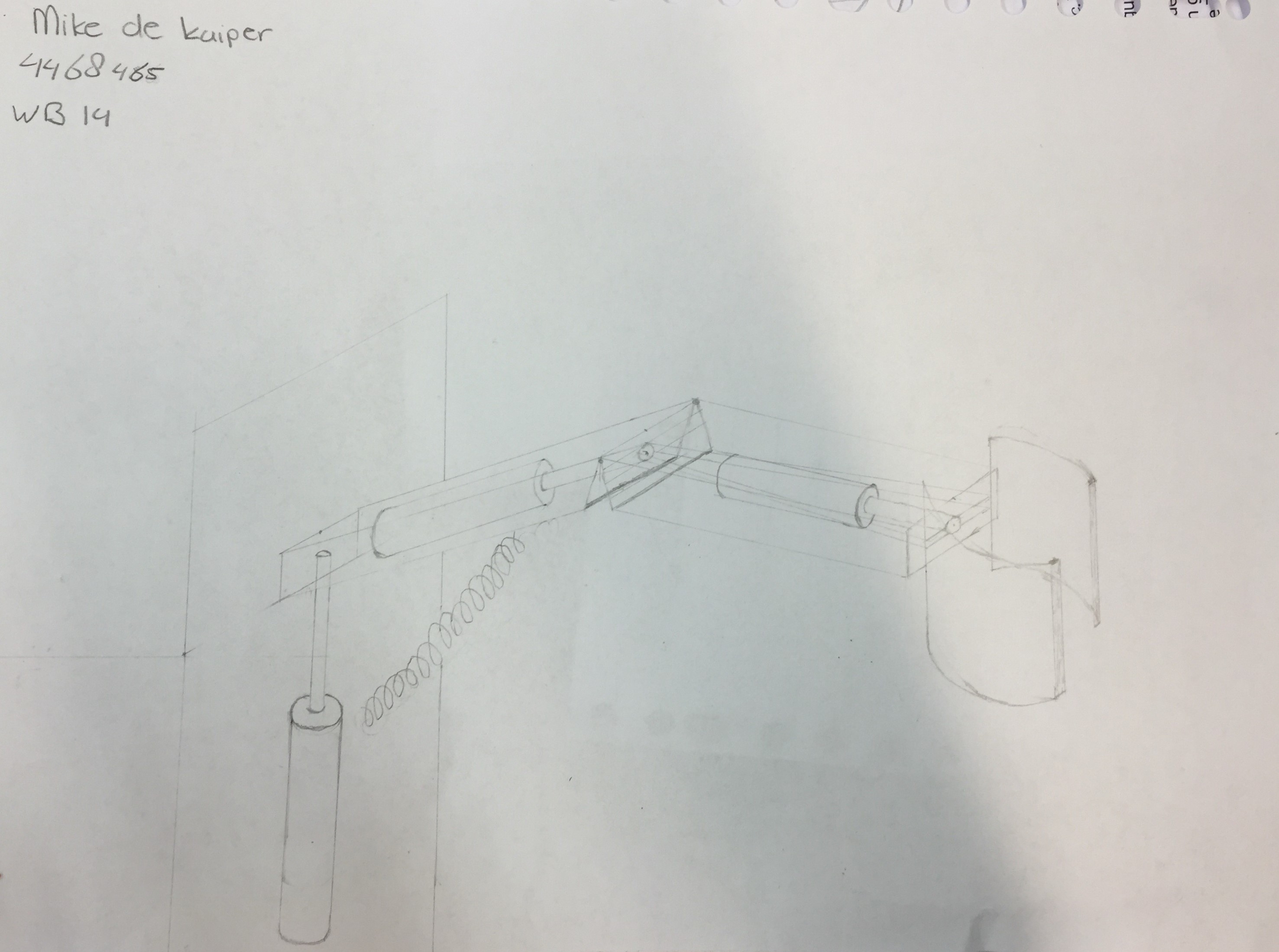
Schets Mike
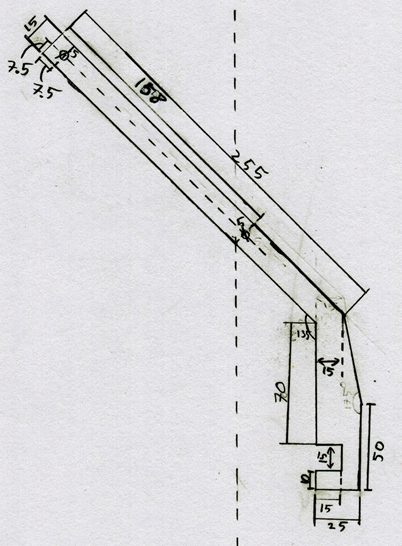
Deze grijper is gebaseerd op het mechanisme van een graafmachine. De grote actuator aan het bord zorgt ervoor dat de grijper 10 cm omhoog en naar beneden kan bewegen. De kleine actuator in de linkerkant van de grijper laat de arm knikken, waardoor je het bekertje niet 10 maar 20 cm kan verplaatsen. Ook zit deze actuator verbonden met de grijphand, want als de hoek van de grijparm verandert, moet de hoek van de grijphand ook worden aangepast om ervoor te zorgen dat het bekertje recht in de hand blijft zitten. Vervolgens zorgt de laatste actuator aan de rechterkant van de grijper ervoor dat de grijphand open en dicht gaat. Tot slot is er ook nog een veer verbonden met het bord en de grijparm om ervoor te zorgen dat de actuator niet te snel uitschiet, zodat de inhoud in het bekertje blijft zitten.
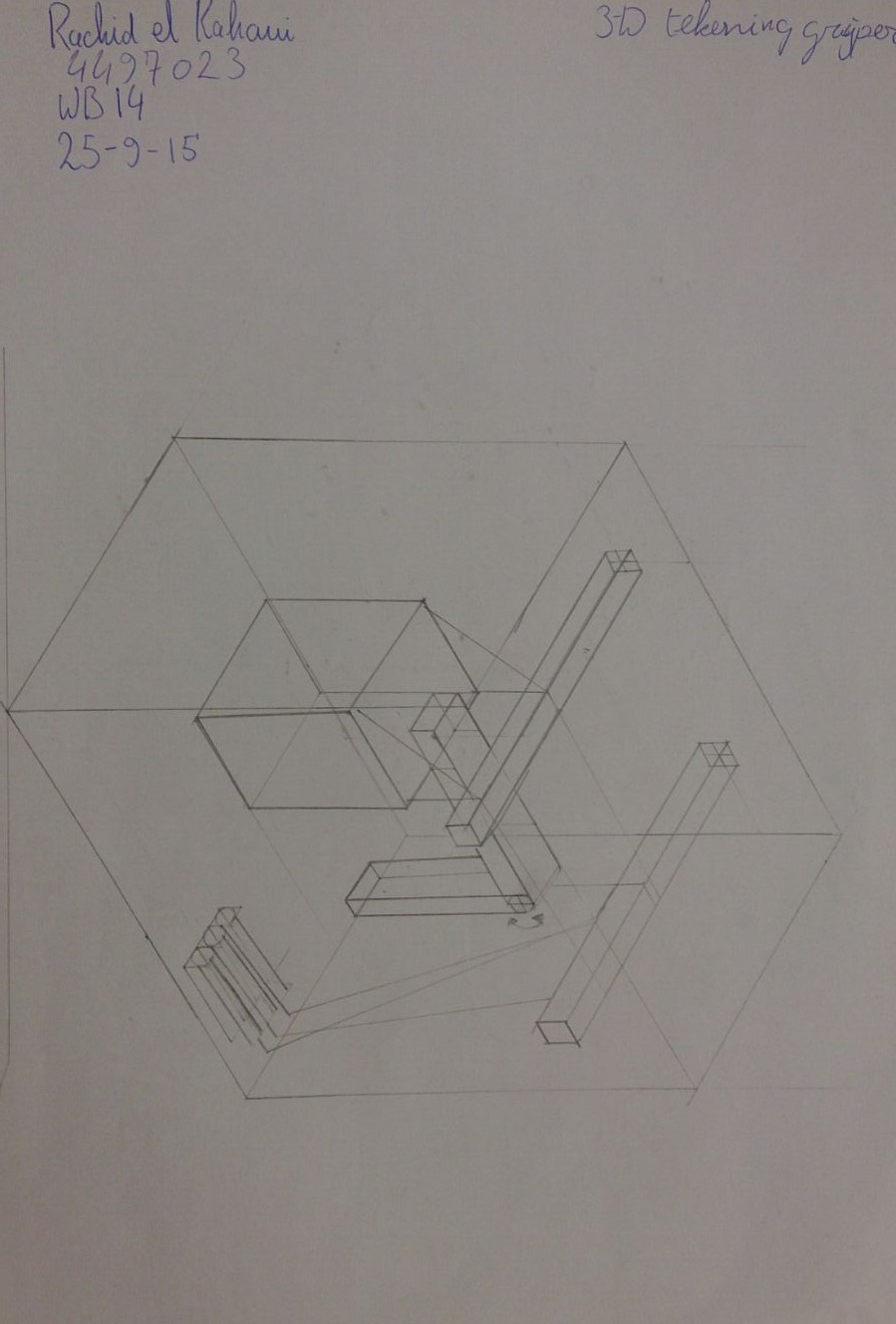
Schets Rachid
Bij deze schets wordt de beker in een kom geslagen door middel van een arm waaraan een gewicht hangt. Waarna deze kom omhoog kan door middel van een actuator, hetzelfde idee als een hijskraan.
Ontwerpproces
Doordat we 7 verschillende ‘grijper-ideeën’ hadden, die enerzijds veel overeenkomsten maar anderzijds ook veel verschillen hebben. Deze verschillen hebben we overzichtelijk gepresenteerd in een morfologisch schema.
| Criteria | Oplossing 1 | Oplossing 2 | Oplossing 3 |
| Bekertje oppakken | Twee halve cirkels die naar elkaar toe bewegen | Vier vingers | Eén halve cirkel beweegt naar de andere halve cirkel
|
| 250mm omhoog | Katrolsysteem | Krukas | Hefboom
|
| Afmetingen bekertje kunnen licht afwijken | Flexibel grijpopervlak d.m.v. verend materiaal | Variëren knijpafstand d.m.v. tandwielen | Veren
|
| Inhoud kan verschillen, en kan uitsteken | Ruime schacht om grijparmen | Vanaf zijkant grijpen | Brede arm
|
| Aandrijving d.m.v. actuatoren, perslucht wordt snel opgebouwd | Mechanische versterking d.m.v. katrollen | Veren | Vertraging door wrijving
|
| Actuatoren moeten snel in- en uitgebouwd kunnen worden | Verbonden tussen krukas en frame | Metaalschroeven | Vertraging door wrijving
|
| Massa is maximaal 0.5kg | Krukas | Katrol | Hefboomwerking
|
| | Haalbaarheid | Stabiliteit | Kosten | Fabricagetijd | Design | Gebruiksgemak | Stevigheid | Totaal |
| Concept1 | 30 | 25 | 10 | 8 | 3 | 10 | 20 | 106 |
| Concept2 | 10 | 30 | 10 | 4 | 5 | 7 | 10 | 81 |
| Concept3 | 20 | 15 | 5 | 6 | 3 | 5 | 20 | 72 |
Hierna hebben we de verschillende oplossingen gekoppeld en beoordeeld aan de hand van verschillende criteria, hierboven in een schema weergegeven. Ook hebben we van de verschillende concepten schetsen gemaakt, die zijn hieronder weergegeven. Uiteindelijk hebben we gekozen voor concept 1 uit ‘Powerbarry the Flowermermaid’.

Conceptversie 1
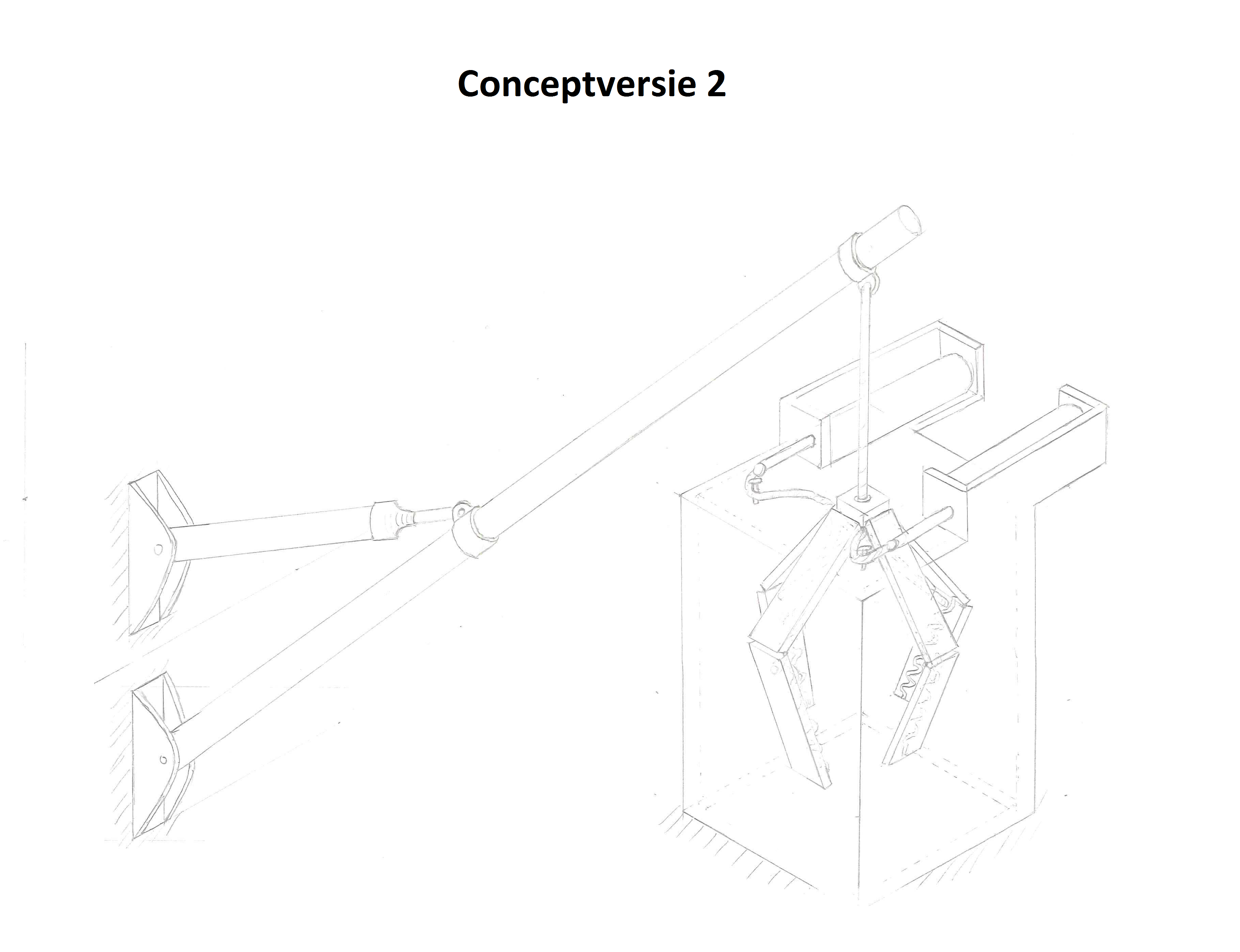
Conceptversie 2
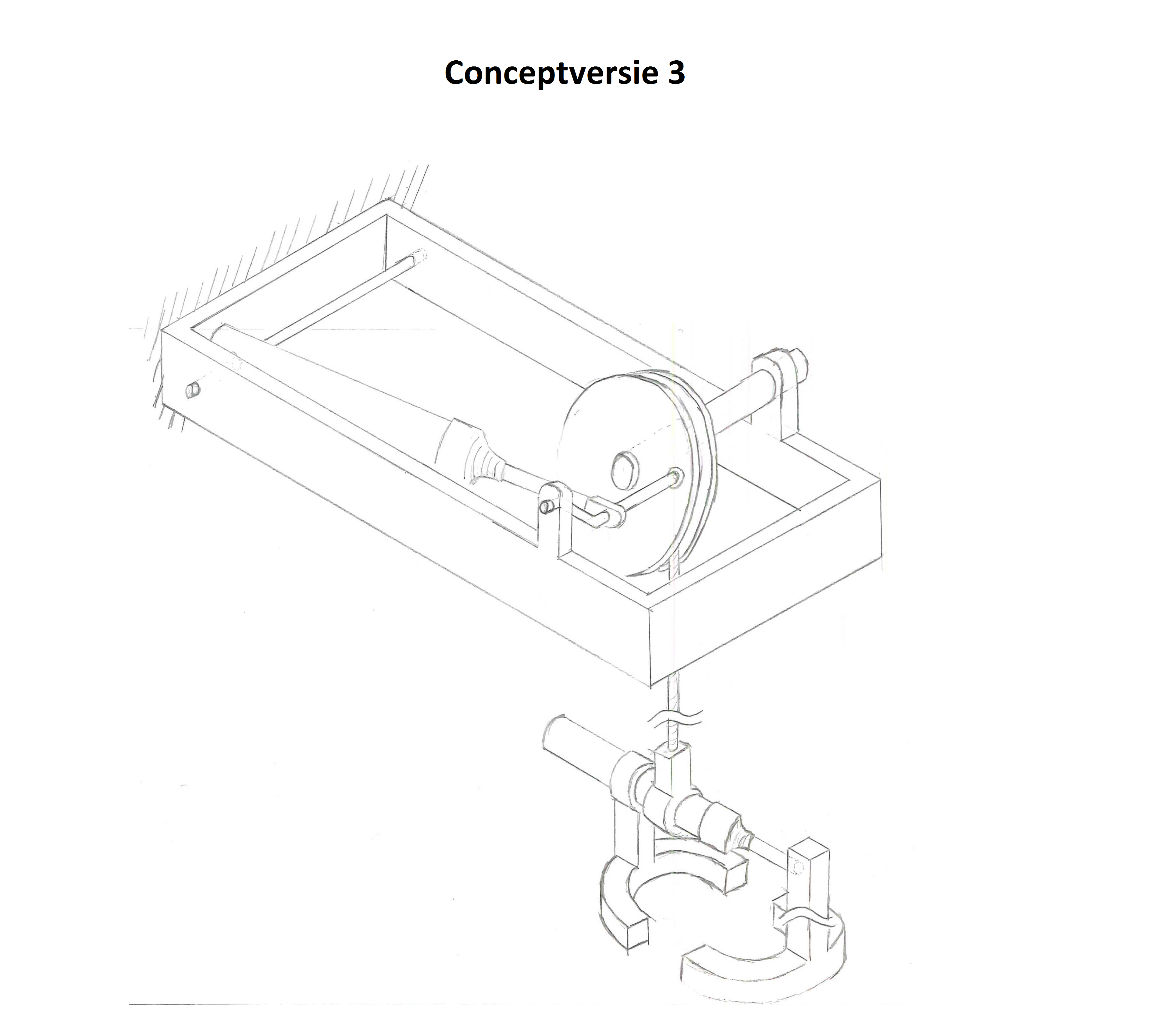
Conceptversie 3
Hier volgt de motivatie voor de keuze van concept 1:
Haalbaarheid: De combinatie van halve cirkels met verend materiaal is makkelijk te fabriceren. We hadden namelijk al het idee om als verend materiaal de spons die om een verfroller zit te gebruiken. Deze vormen pasten goed in elkaar. Doordat we een katrolsysteem willen gebruiken om de grijper 25 cm omhoog te tillen, hebben we meteen een minder snelle beweging. Dit is omdat het touw alleen in trekspanning kan, en de actuator onder andere drukspanning levert. Doordat er drukspanning op het touw komt, rekt het touw uit en dat zorgt voor een kleine vertraging. De snelheid waarmee het bekertje wordt opgetild wordt zo dus kleiner. De actuatoren moeten snel in- en uitgebouwd kunnen worden. Metaalschroeven zijn goedkoop (lage kosten) en makkelijk te verkrijgen.
Stabiliteit: Concept 2 is stabieler vanwege de ruime schacht om de grijparmen. Echter is concept 1 ook erg stabiel. Door een combinatie van de huidige oplossingen en het idee van Gijs om een liftschacht te maken voor de geleiding, hebben we uiteindelijk voor een L-vorm gekozen (zie conceptversie 1). De lange zijde zorgt ervoor dat de grijper in een rechte beweging naar boven en naar beneden beweegt en zit door middel van een schacht verbonden aan de ophangplaat die aanwezig was op de plek waar we de grijper fabriceerden.
Fabricagetijd: We hebben ervoor gekozen om het grootste gedeelte te maken uit perspex door middel van de lasersnijder, dit werd door de TU ter beschikking gesteld en koste ons geen geld. Daarom was deze keuze prijstechnisch erg aantrekkelijk. De tekening in MS Visio is snel te maken. De diffrentiaalkatrol kon Gijs thuis maken, want hij heeft een werkplaats thuis. Een krukas is moeilijker te fabriceren want de krachtverdeling loopt al snel scheef en de actuatoren moeten precies goed lopen. De hefboom was wel makkelijk te fabriceren, echter waren hier de minpunten dat deze veel plek in beslag neemt en dat het bekertje hiermee moeilijk te grijpen is omdat de hefboom snel scheef kan gaan. De keuze voor de katrol als mechanische versterker heeft dus ook te maken met haalbaarheid en gebruiksgemak.
Stevigheid:De optie ‘4 grijparmen’ viel al snel af omdat dit uit meer verschillende onderdelen bestaat en we maar een beperkte hoeveelheid perspex tot onze beschikking hadden. We zouden de armen dan niet dikker kunnen maken door stukjes perspex op elkaar te plakken, wat als gevolg zou hebben dat de armen snel zouden kunnen breken. Bij twee halve cirkels konden we dit wel doen.
Tot slot Design: Redelijk onbelangrijk, maar niet geheel onbelangrijk. Aangezien we bij concept 2 gebruik wilden maken van een krukas, en we dit er cool en ingewikkeld uit vonden zien, heeft dit concept het meest aantal punten gekregen voor design. Dat dit totaal onbelangrijk is, wordt nu wel duidelijk. Ook al heeft concept 2 de meeste punten bij dit criterium, heeft dit concept niet gewonnen!
Het Bouwprocess
Het bouwproces van onze grijper begon toen we besloten hadden welke grijper we wilden gaan maken. De eerste stap was het maken van duidelijke tekeningen van de onderdelen van de grijper en de grijper zelf. Hiervoor zijn we naar de assemblagewerkplaats geweest en hebben we opgemeten hoe groot de actuatoren precies zijn. We hebben aan de hand van deze tekeningen berekend hoe groot alle onderdelen moesten zijn.
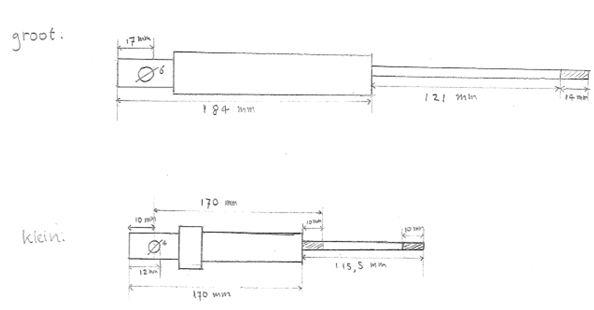
Afmetingen actuatoren
Afmetingen grijparm

Afmetingen L-vormig ophangsysteem
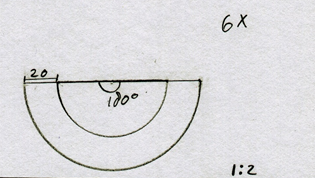
Afmetingen cirkels grijparm

Afmetingen grijparmen
Aan de hand van deze tekeningen hebben we free body diagrams getekend om te onderzoeken of er in onze grijper evenwicht zou gaan heersen.
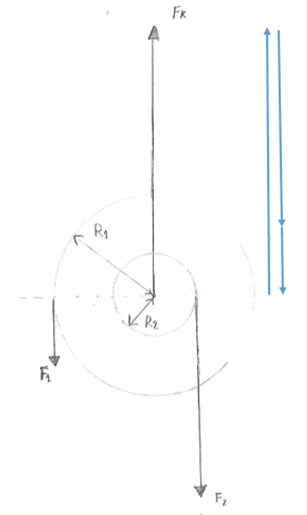
FBD differentiaalkatrol
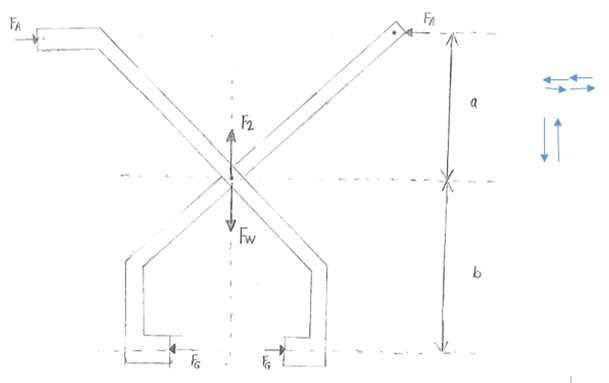
FBD grijper
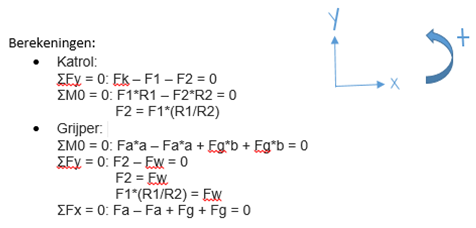
Berekeningen
We hebben ook uitgezocht of het bouwen van onze grijper niet te duur zou worden, de resultaten hiervan zijn af te lezen in de volgende tabel.
| Materiaalsoort | Prijs/kg | Dichtheid(kg/m3) | Prijs/m3 | m3 gebruikt | Prijs | Bron |
| Hout | €0,5205 | 730 | €379,97 | 0,000618 | €0,23 | CES Edupack 2015 |
| Perspex | €2,105 | 1190 | €2.504,95 | 0,000588 | €1,47 | CES Edupack 2015 |
| Touw | - | - | - | - | €0,10 | |
| Bouten/moeren/schroeven | - | - | - | - | €1,83 | |
| Grote actuator | - | - | - | - | €61,32 | Kiowa |
| Kleine actuator | - | - | - | - | €53,48 | Kiowa |
Vervolgens hebben we in MS Visio de onderdelen die we uit perspex wilden getekend en deze konden we een week later ophalen. De rest van de onderdelen hebben we uit hout gemaakt en we hebben bouten, moeren, metalen bevestigingshoeken, lijm, touw en spons van een verfroller gekocht.
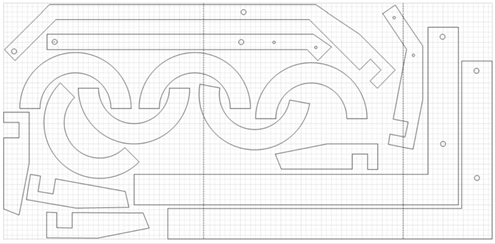
MS Visio tekeningen
Tijdens het bouwen van Barry waren er een aantal dingen waar we tegen aanliepen. Daarom geven we hier een overzicht van de zaken die tijdens het bouwproces zijn aangepast.
Het resultaat
Tijdens het practicum hebben we naast het filmen van onze grijper verschillende eigenschappen van gemeten. Een overzicht hiervan is te zien in de onderstaande tabel.
| Te berekenen | Theoretisch | Meting 1 | Verschil | Mogelijke reden |
| Maximale opening | (Xactuatorklein*Dactuator)/Dknijp
= (10*112)/140
= 8 cm
| 7.7 cm +- 0.5 mm | 0.3 cm +- 0.5 mm | Kleine afwijkingen in bouwproces |
| Hoeveelheid kg optillen* | (Factuatorgroot*Rkatrolklein)/Rkatrolgroot-(mgrijper*9.81)
= (58*3)/7.5 – (0.4*9.81)
= 19.3 N = 1.96 kg
| 0.53 kg +- 0.5 gr | 1.43 kg +- 0.5 gr | Grote wrijving in schacht en geleiding grijper |
| Hoeveel cm omhoog | (Xactuatorgroot*Rkatrolgroot)/Rkatrolklein
= (10*7.5)/3
= 25 cm
| 24.0 cm +- 0.5 mm | 1 cm +- 0.5 mm | Door dikte touw verandert omtrek van de katrol zodra het touw meer dan 3 keer om de katrol gewikkeld is. |
*Massa constructie, massa bekertje en de wrijving verwaarloosd.
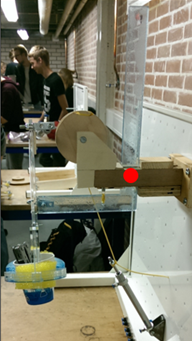
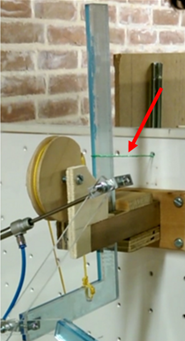
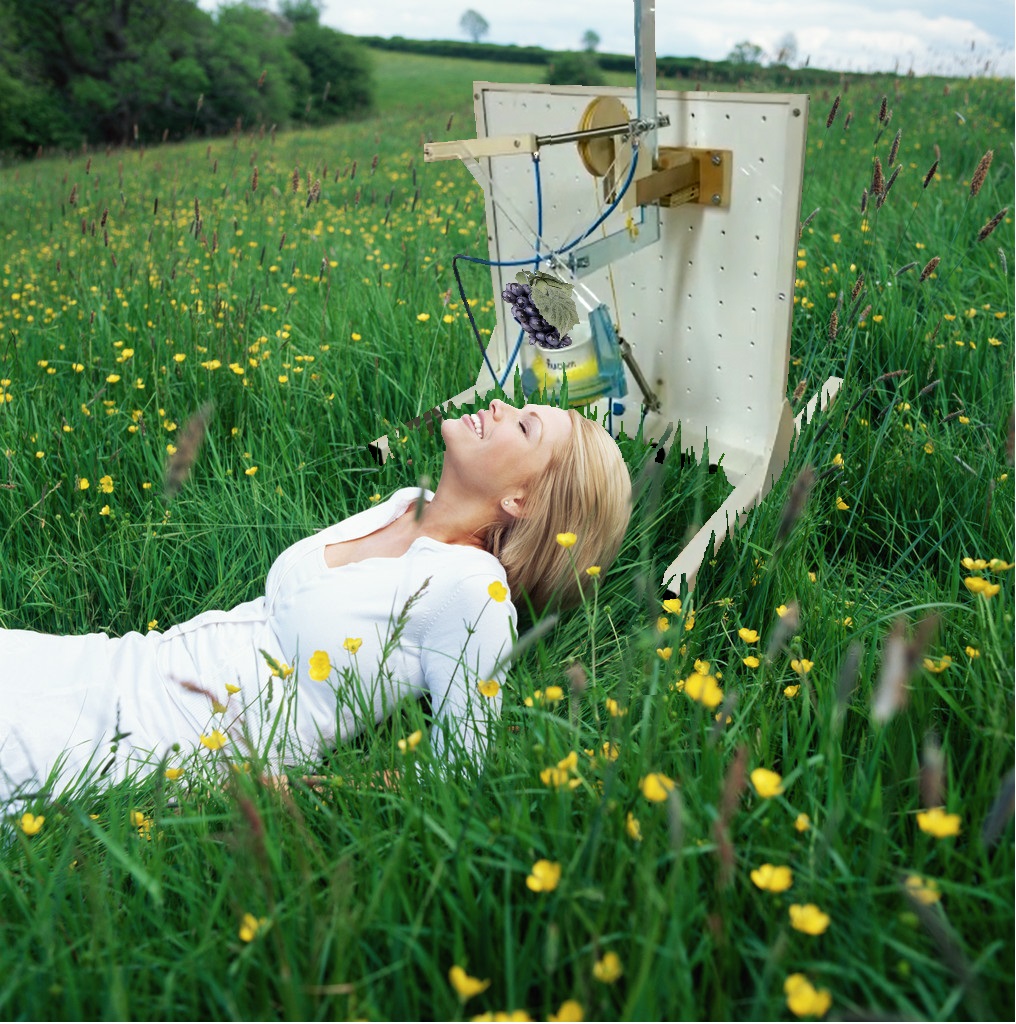
Waar we allemaal op zaten te wachten
Eindelijk zijn we aangekomen bij de vieze plaatjes waar we allemaal op gewacht hebben. Hieronder wat
foto´s van de paparazzi die the one and only Mister Steal Your Girl dag en nacht op de voet gevolgd hebben. Aanschouw PowerBarry in his natural habitat en kijk hem gaan met wat van zijn dames.


Samenwerking
De samenwerking in ons groepje is heel soepel verlopen. Aan het begin van elke week nam Anne Bakx de taak op zich om de opdrachten eerlijk te verdelen. De moeilijke opdrachten werden gemaakt door 2 of meer mensen en de makkelijkere opgaven werden individueel gemaakt. Door middel van Trial en Error en met behulp van verschillende informatie bronnen (lesstof uit Blokboek en uit de slides van onder andere Technische Systemen en Statica) zijn de opdrachten grotendeels goed gemaakt.
Als er iemand uit de groep eerder klaar was dan hielp degene mee met het oplossen van de andere problemen. De bedoeling was om op dinsdag het meeste af te hebben zodat we genoeg tijd nog hadden om gezamenlijk de moeilijke opdrachten af te maken voor de deadline op vrijdag.
Deze planning heeft zeer zeker geholpen aangezien we geen enkele keer te laat waren met inleveren.
De taakverdeling en het verloop van het project werd bijgehouden door Rachid el Rahaui in een bestand in Google Drive die ten alle tijde toegankelijk was voor iedereen.
Om ervoor te zorgen dat iedereen op tijd naar de geplande afspraken kwam, werd een effectief plan bedacht, namelijk: Als je te laat komt dan moet je een taart meenemen. Uiteindelijk zijn er maar 2 taarten gekocht, dus heeft het prima gewerkt.
Afgezien van de efficiënte manier van samenwerken hebben we ook een leuke tijd met z’n allen meegemaakt, dit kwam door de leuke/gezellige werksfeer die hoog gehouden werd door regelmatig in de rondte gegooide grappen hoe flauw of goed ze ook waren.
Van links naar rechts: Maxime Croft (4390024), Gijs Klemann (4452860), Brian Roos (4290623), Rachid el Rahaui (4497023), Mees Matthieu (4436792), Mike de Kuiper (4468465), Anne Bakx (4447174)