De ontwerpen
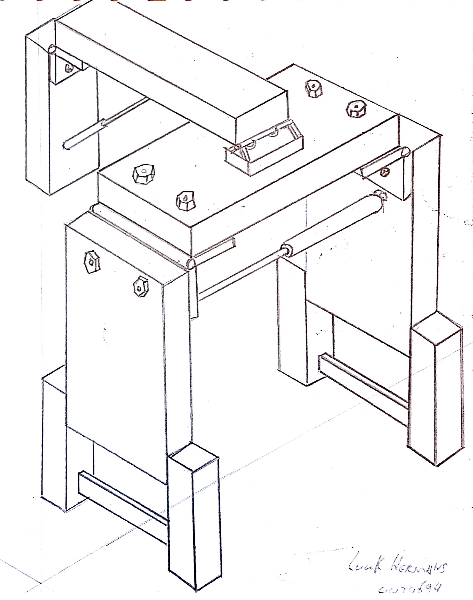
Deze grijper is ontworpen door Luuk Hermans. Deze grijper is ontworpen met het idee zo simpel mogelijk te zijn. Hij beweegt door middel van een hefboomsysteem met een actuator de arm omhoog, waarna een andere actuator de grijparmen samenknijpt waardoor het bekertje wordt vastgepakt. Tussen de 'vingers' van de grijper zitten elastieken, waardoor de kracht waarmee de het bekertje gepakt wordt niet zo groot wordt dat het bekertje kapot gedrukt wordt, maar wel groot genoeg is dat het bekertje stevig vast gepakt wordt. Zo kan het bekertje namelijk goed worden ingesloten door de elastieken. Omdat het elastiek een grotere wrijvingscoefficient heeft dan het perspex zorg je voor maximale grip op het bekertje.
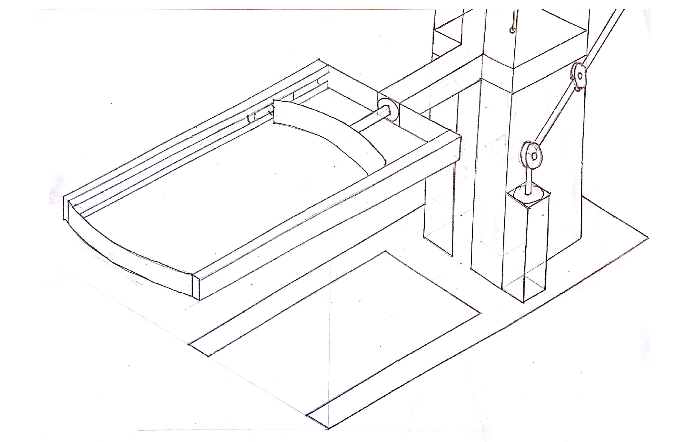
Deze grijper is ontworpen door Michiel Smedes.
Het idee achter deze grijper is om het bekertje op een, zo stabiel mogelijke, manier op te tillen. Dit werkt als volgt, allereerst wordt het bekertje ingeklemd in het rechthoekige oppaksysteem. Vervolgens wordt het oppaksysteem omhoog getild door een lift systeem. Deze werkt via een actuator die met een hefboomsysteem (zie rechts op de foto), een touw naar beneden trekt. Dit touw gaat vervolgens de liftschacht en tilt het grijpsysteem op.
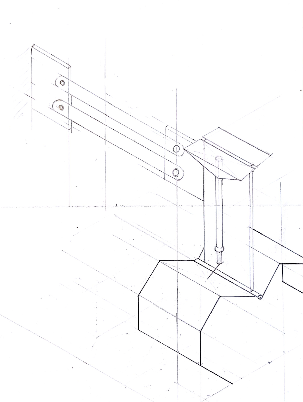
Deze grijper is ontworpen door Sophie den Boer. Deze grijper pakt voorwerpen op met behulp van twee halfronde onderdelen. Deze bewegen doordat twee actuatoren aan beide kanten de onderdelen omhoog trekken en omlaag duwen. Omdat het grijperonderdeel natuurlijk ook zijwaarts verplaatst ten opzichte van de actuator, zijn deze verbonden met draad. Om omlaag toch genoeg kracht uit te kunnen oefenen, drukt de actuator in zijn langste positie tegen het grijperonderdeel aan. Het voordeel van deze grijper is dat er maar weinig onderdelen nodig zijn en hij voor een groot deel eenvoudig te monteren is. Een nadeel is bijvoorbeeld dat de grijper misschien niet de beste vorm heeft om een rond bekertje op te kunnen pakken en dat de actuatorverbinding met het grijperonderdeel misschien niet stevig genoeg is.
Keuze proces
De opdracht was om een bekertje, waarvan de inhoud maximaal 0.5 kg kon zijn, 25cm op te tillen. De
belangrijkste eisen voor onze grijper waren dus de tilkracht van de grijper en het bereik dat hij heeft.
Verder vonden wij ook heel belangrijk hoe moeilijk het zou zijn om de grijper te maken, de stabiliteit
van het bekertje en de knijpkracht die uitgeoefend wordt op het voorwerp. Andere, iets minder
belangrijke eisen waren bijvoorbeeld nog de grootte van de grijper en de originaliteit. De tilkracht
was bij sommige ontwerpen iets beter dan bij andere, maar overal wel voldoende, en het bereik kon
bij alle grijpers makkelijk voldoende gemaakt worden door de lengte van de arm aan te passen.
Doordat veel ontwerpen een soort scharnier tussen de arm en het grijpgedeelte van de grijper
hadden, zouden deze allemaal ongeveer even stabiel zijn, alleen het ontwerp van Michiel week
daarvan af. Zijn 'lift' zou voor meer stabiliteit zorgen, dus dit ontwerp had hierin onze voorkeur.
Helaas was dit ontwerp een heel stuk lastiger te maken dan de andere, en die van Luuk was juist heel simpel. Uiteindelijk, in combinatie met de andere eisen heeft die simpelheid toch de doorslag gegeven en hebben we Luuks ontwerp gekozen om te maken.
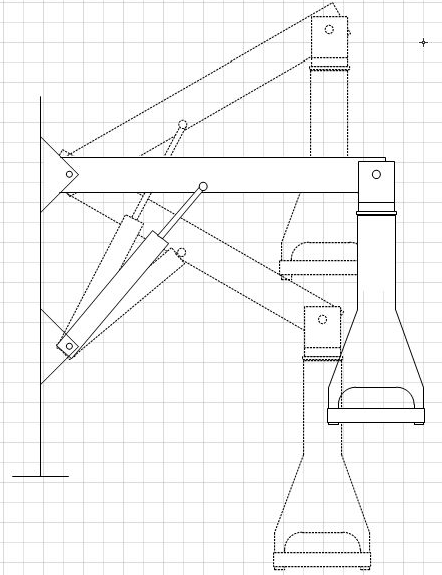
Werking ontwerp
De arm van dit ontwerp maakt gebruik van een hefboom-mechanisme waarbij de kracht tussen het
draaipunt en de last ligt. De arm zit aan de ene kant met een scharnier vast aan de wand, en met de
andere kant met een scharnier aan het grijp-gedeelte van de grijper. De actuator zit ook met een
scharnier vast aan de wand en aan de arm. Door de actuator uit te schuiven, wordt er een moment gecreeerd, dat de arm omhoog drukt.
De twee handen van de grijper zitten met scharnieren vast aan een plaat en doordat de actuator aan
de bovenkant van de handen bevestigd is, gaan de onderkanten verder uit elkaar dan de actuator in
en uit kan schuiven. Wanneer deze actuator volledig ingeschoven is, is de opening tussen de twee
onderkanten net iets kleiner dan een bekertje. Het bekertje wordt toch niet ingedeukt omdat de
elastieken tussen de vingers van de handen een beetje uit kunnen rekken, hierdoor blijft het bekertje
stabiel in positie gehouden.
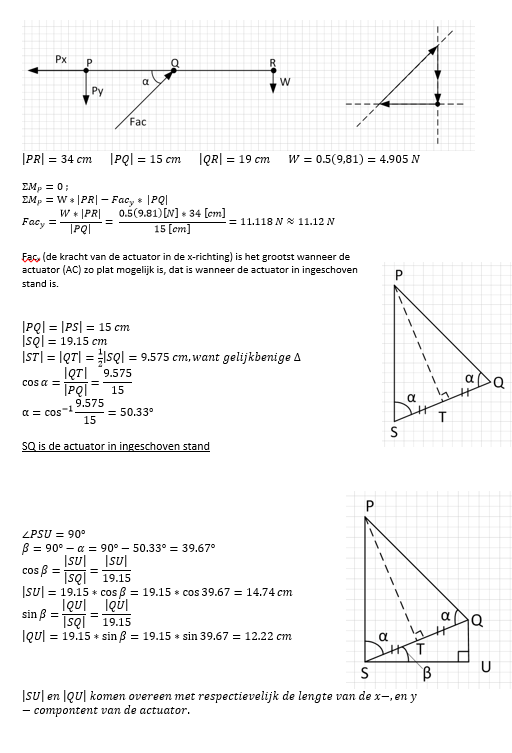
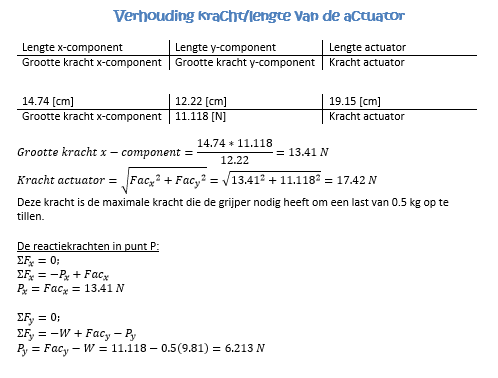
Berekeningen
De lengte van de grijparmen zijn 22cm , dit komt doordat wanneer de grijper in de lage stand staat de hoogte van het uiteinde van de arm exclusief de houtenscharnieren en de hoogte van het bekertje 22cm is. Dit is dus niet berekend maar opgemeten en dit wordt in de volgende berekeningen gebruikt.
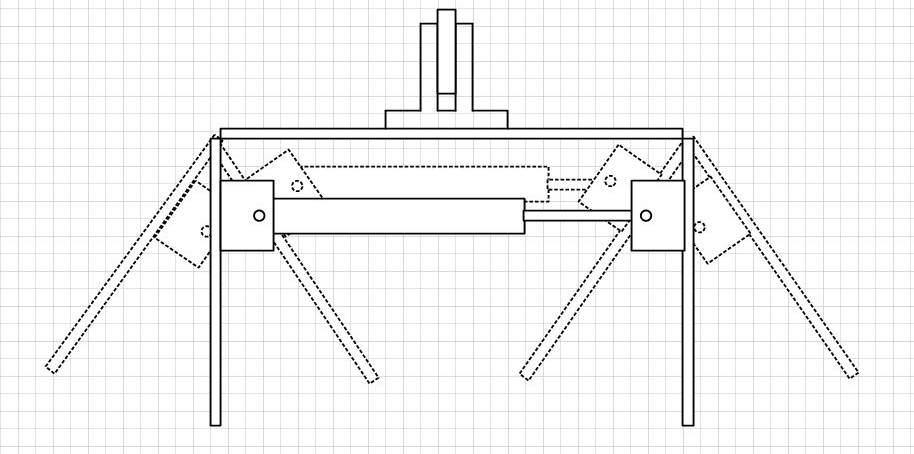
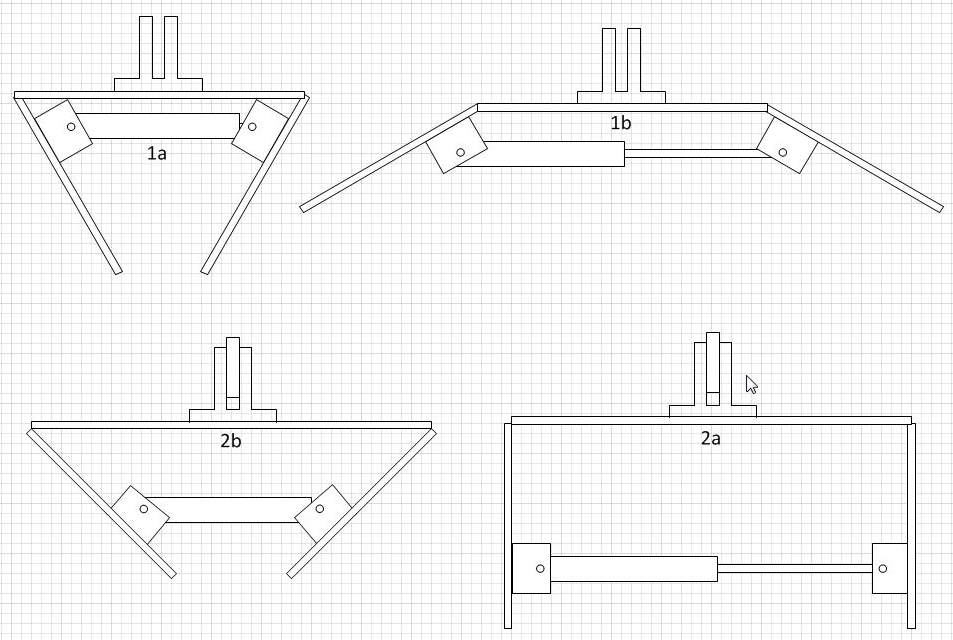
Voor het grijpsysteem wilden we dat de grijper in gesloten toestand een breedte van 6 cm had, aangezien het bekertje een diameter van 7 cm had. Verder wilden we dat de grijper in zowel open als gesloten stand zo smal mogelijk was. Om de grijper in gesloten stand zo klein mogelijk te maken moeten we de actuator zo hoog mogelijk plaatsen, zie figuur 1a, maar dan wordt de grijper in open stand heel breed, zie figuur 1b. Als we de actuator in open stand smal willen moeten we de actuator heel laag plaatsen, zie figuur 2a, maar dan wordt de grijper in gesloten stand weer heel breed, zie figuur 2b. We moeten dus een middenweg zien te vinden tussen deze beide extremen. Dit hebben we gedaan door eerst beide breedtes uit te rekenen wanneer de actuator vrij hoog zit, vervolgens hebben we de actuator wat naar beneden verplaatst en dit herhaald tot we tot breedtes kwamen waar we tevreden me waren. Zo kwamen we uit op dat we de actuator op 17/22e van de hoogte van de grijparm moesten plaatsen en dat de horizontale plaat 27 cm moest zijn.
Fabricage
Toen het ontwerp afgerond was en de perspexonderdelen opgehaald waren, is het assembleren van de grijper begonnen. Door het zeer simpele ontwerp was dit goed te doen. De hoofdonderdelen zijn, met behulp van een laser, uit perspex gesneden en bijgevijld, daarnaast zijn de scharnieren uit hout gefabriceerd. Het voordeel van hout was, dat het gedurende het fabricageproces nog in grootte aangepast kon worden.
Vervolgens zijn wij gaan testen of onze grijper aan de voorwaarden voldeed. Het vastpakken van het bekertje ging zeer goed, zowel een leeg als een gevuld bekertje kon hij vastpakken zonder dat het voorwerp instabiel werd. Ook zware bekertjes kon hij met gemak optillen, deze bleven door de elastieken ook goed zitten.
Wij hadden echter wel problemen met de drukregelaar, waardoor de actuatorkracht te groot werd. Het gevolg hiervan was dat het bekertje vrij snel omhoog ging, wat bij een vloeibare inhoud problemen kan opleveren en dat het bekertje bij het neerzetten met een zeer grote snelheid de grond raakte, waardoor het omviel. Een verbeterpunt is dus om de actuatordruk laag te houden, zodat het bekertje beheerst opgetild en neergezet kan worden.
Conclusie
Na acht weken hebben wij dit project afgerond, wij zijn erg trots op de grijper die wij neergezet hebben. Ondanks de te hoge actuatorkracht voldeed De Krokodil aan de eisen en visie die wij voor onze grijper hadden bepaald. Daarnaast is het samenwerken, hoewel wij een kleinere groep hebben, tijdens de groepsopdrachten en het ontwerpproces zeer soepel verlopen.