Theorie
Waardes
$m1$ = massa 1 [$kg$]
$m2$ = massa 2 [$kg$]
$g$ = gravitatieconstante = 9.81 [$m/s^2$]
$T$ = kracht die in het touw werkt [$N$]
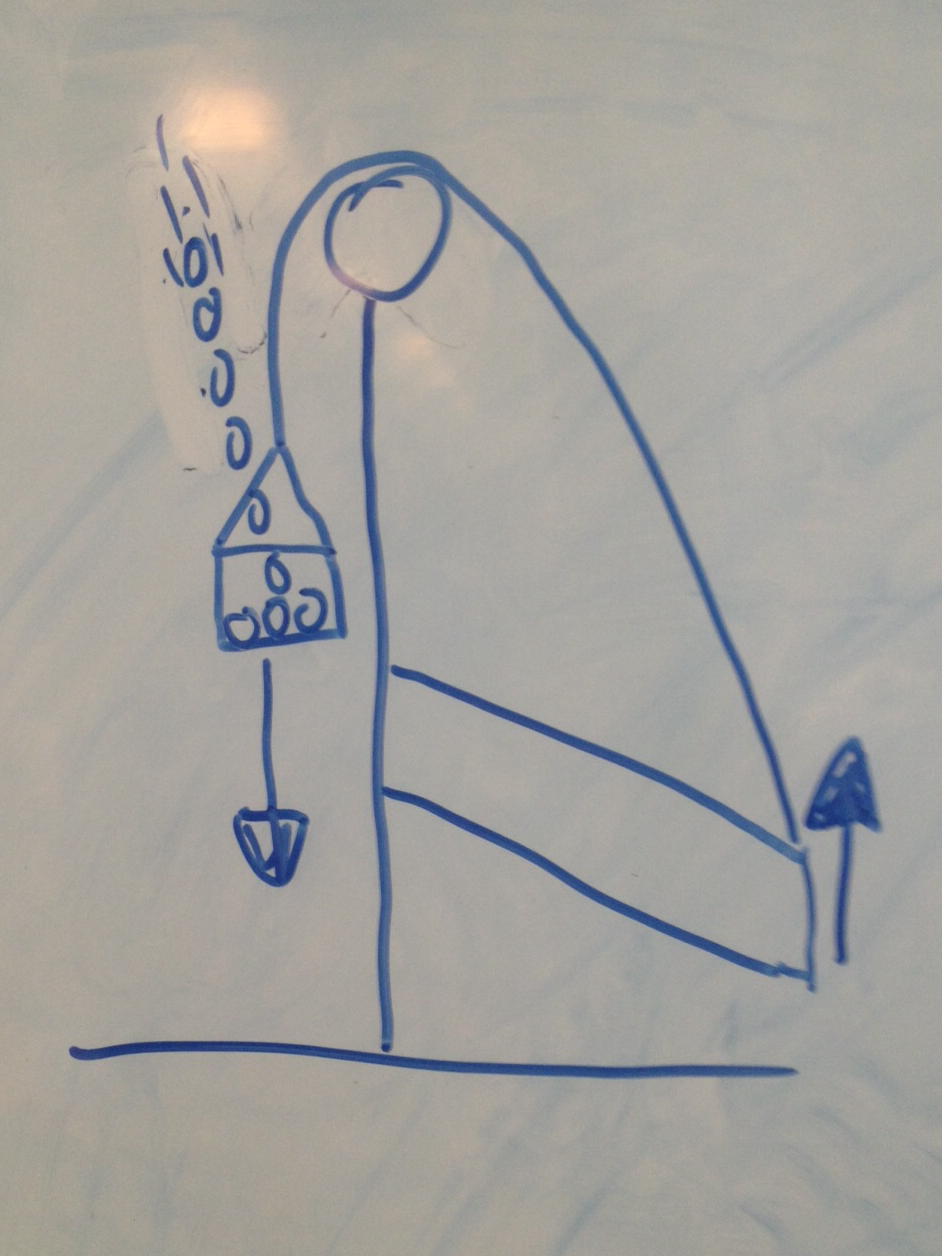
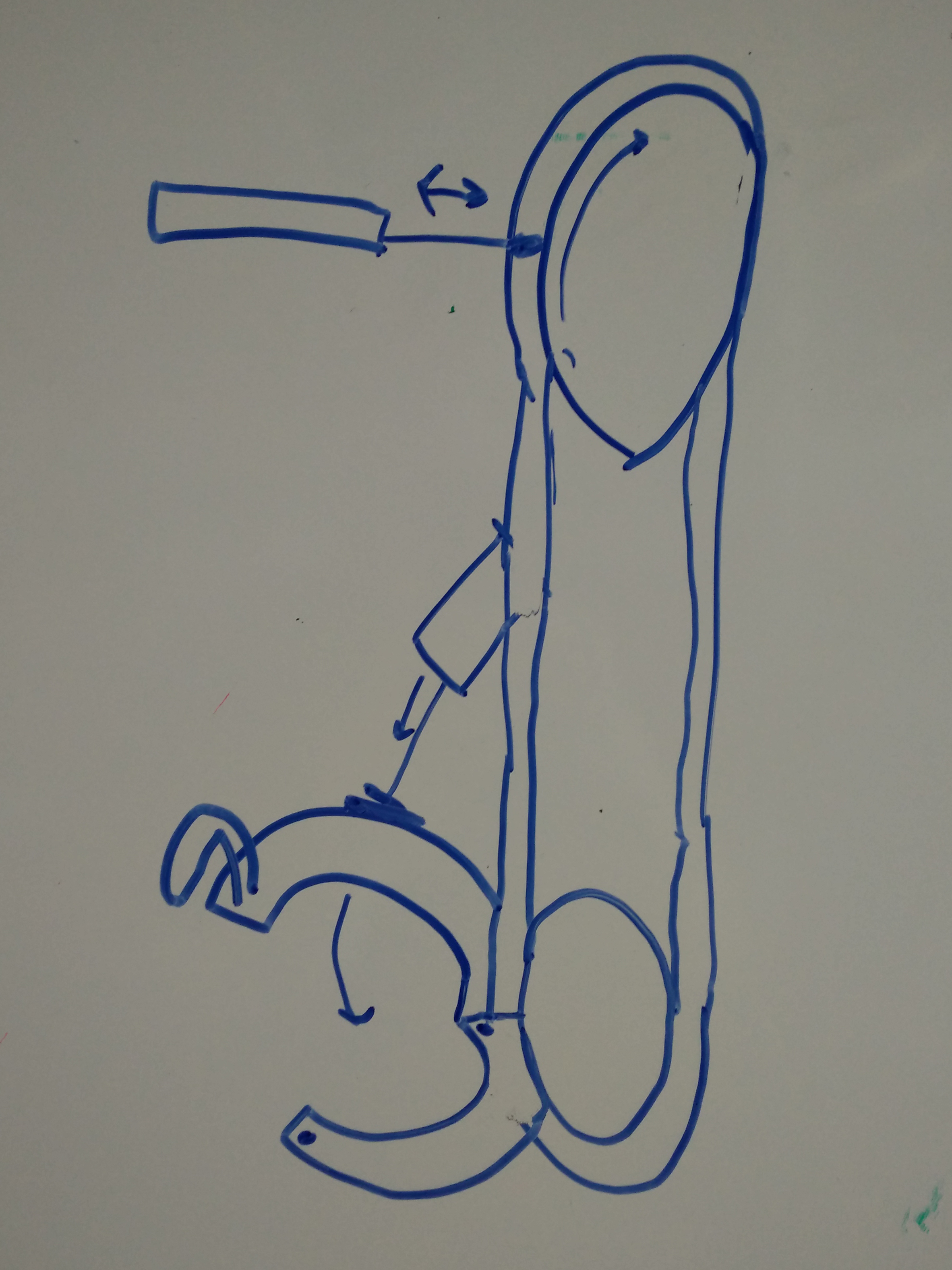
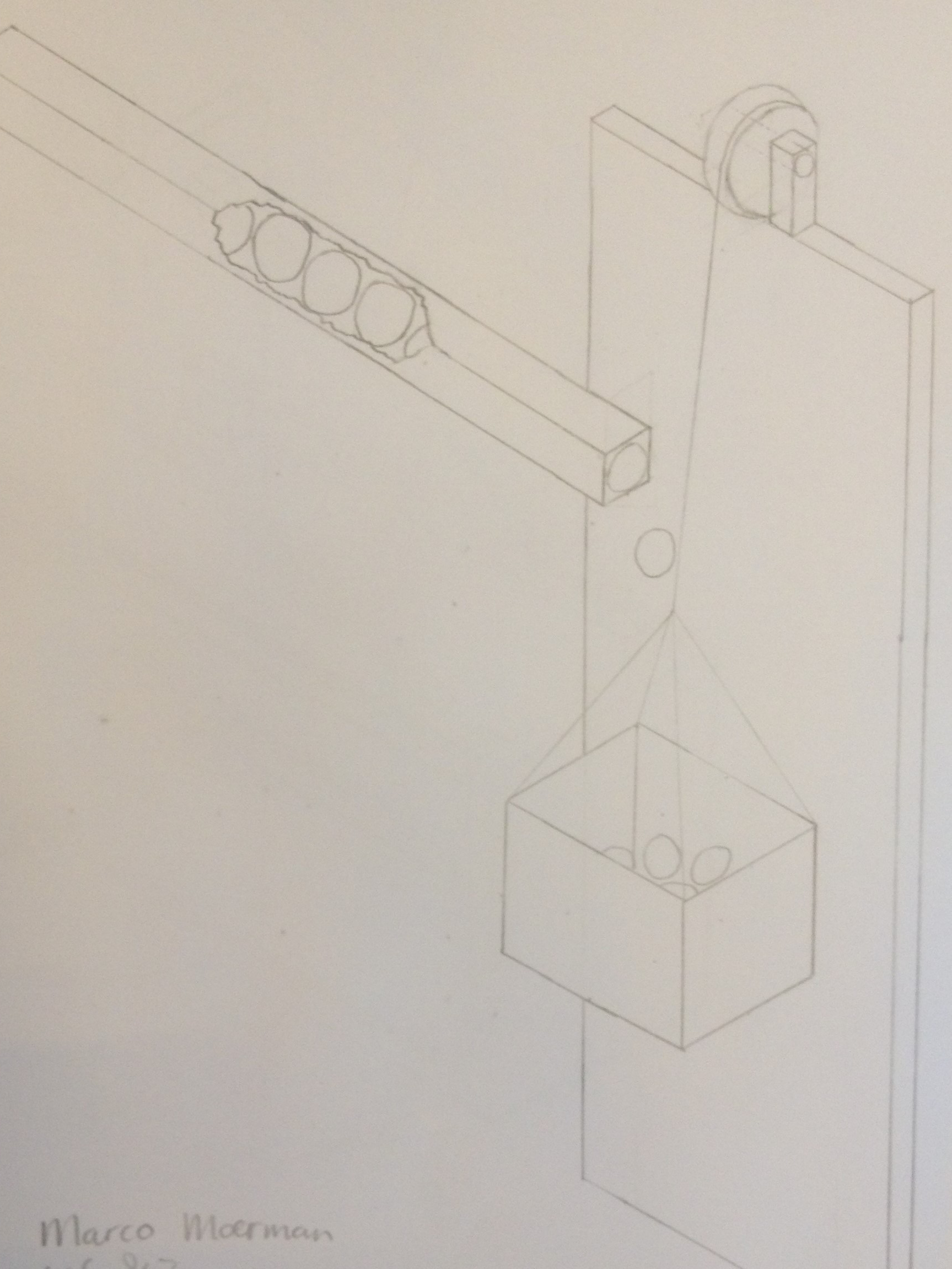
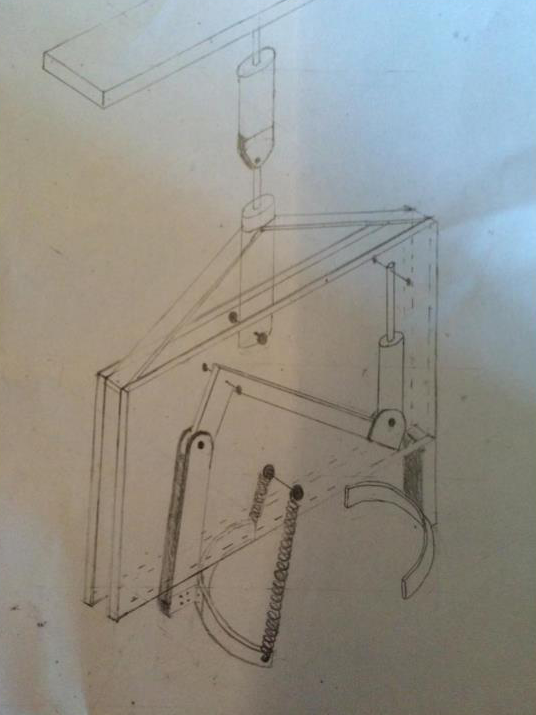
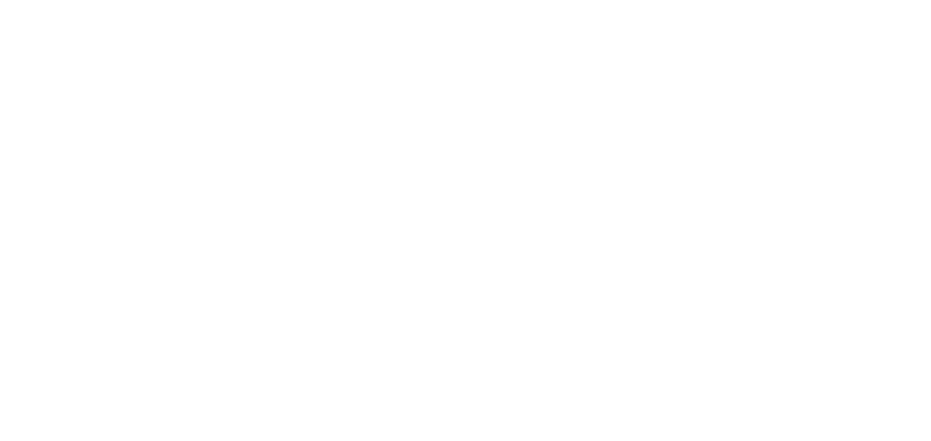
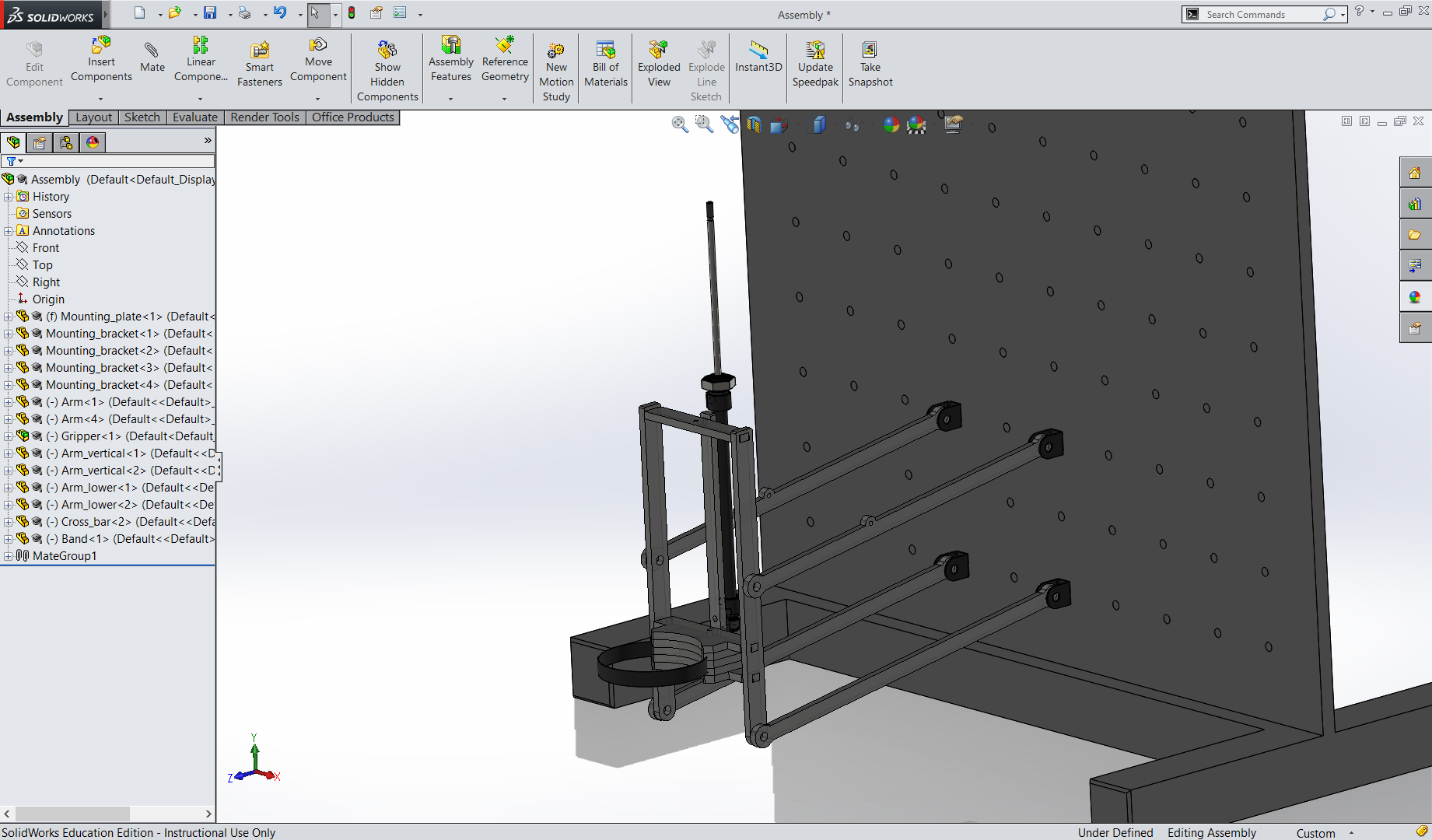
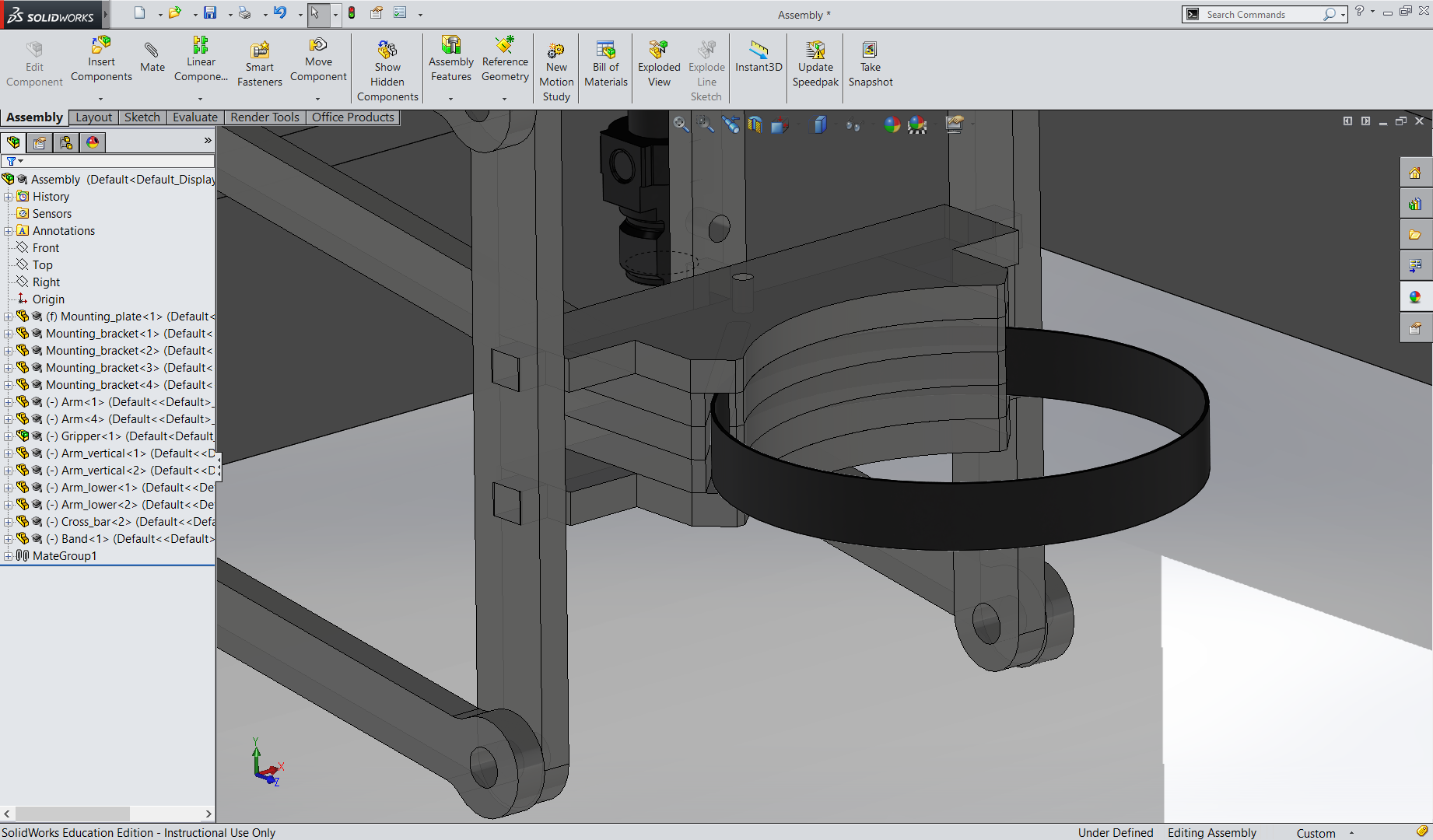
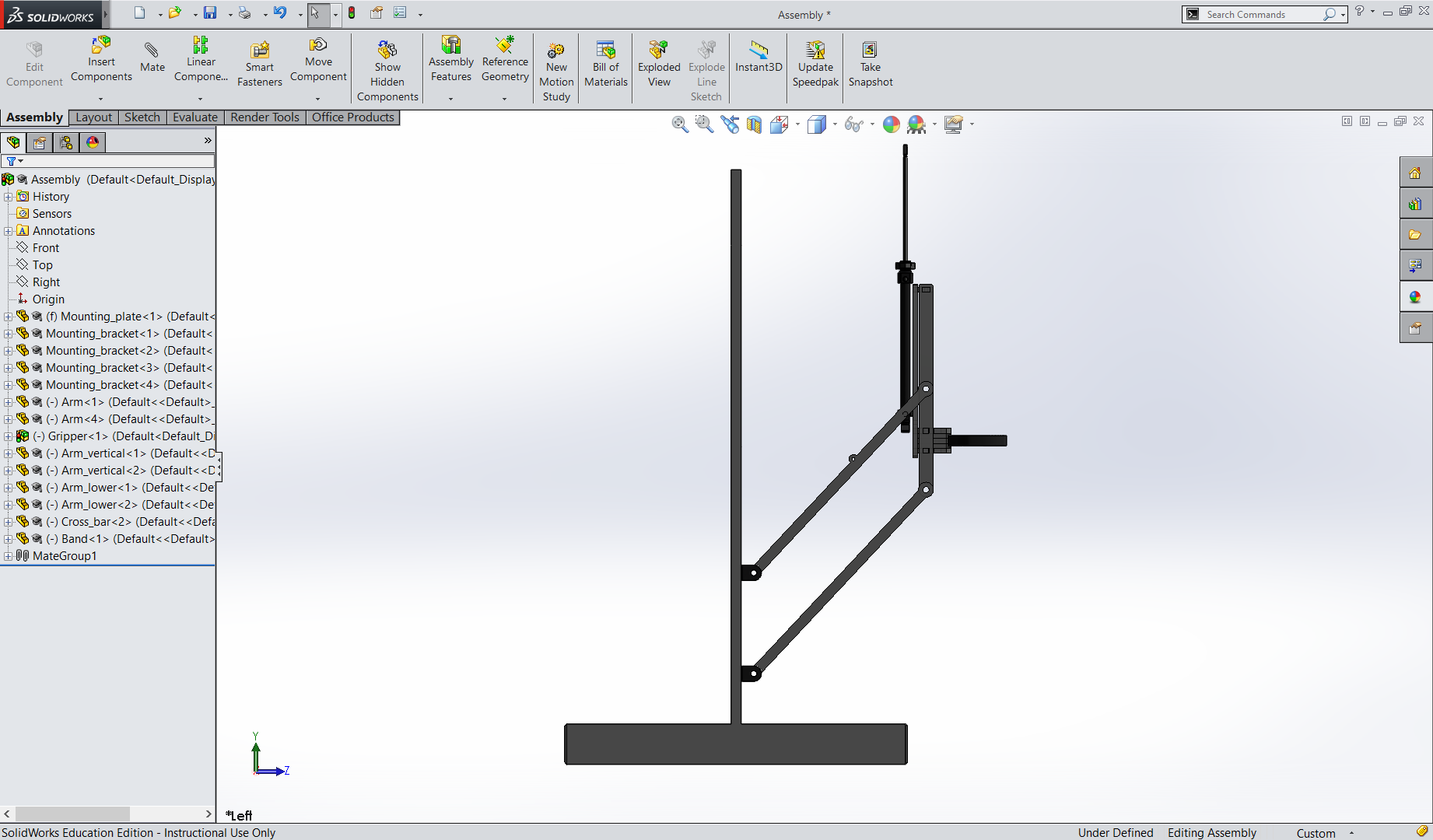
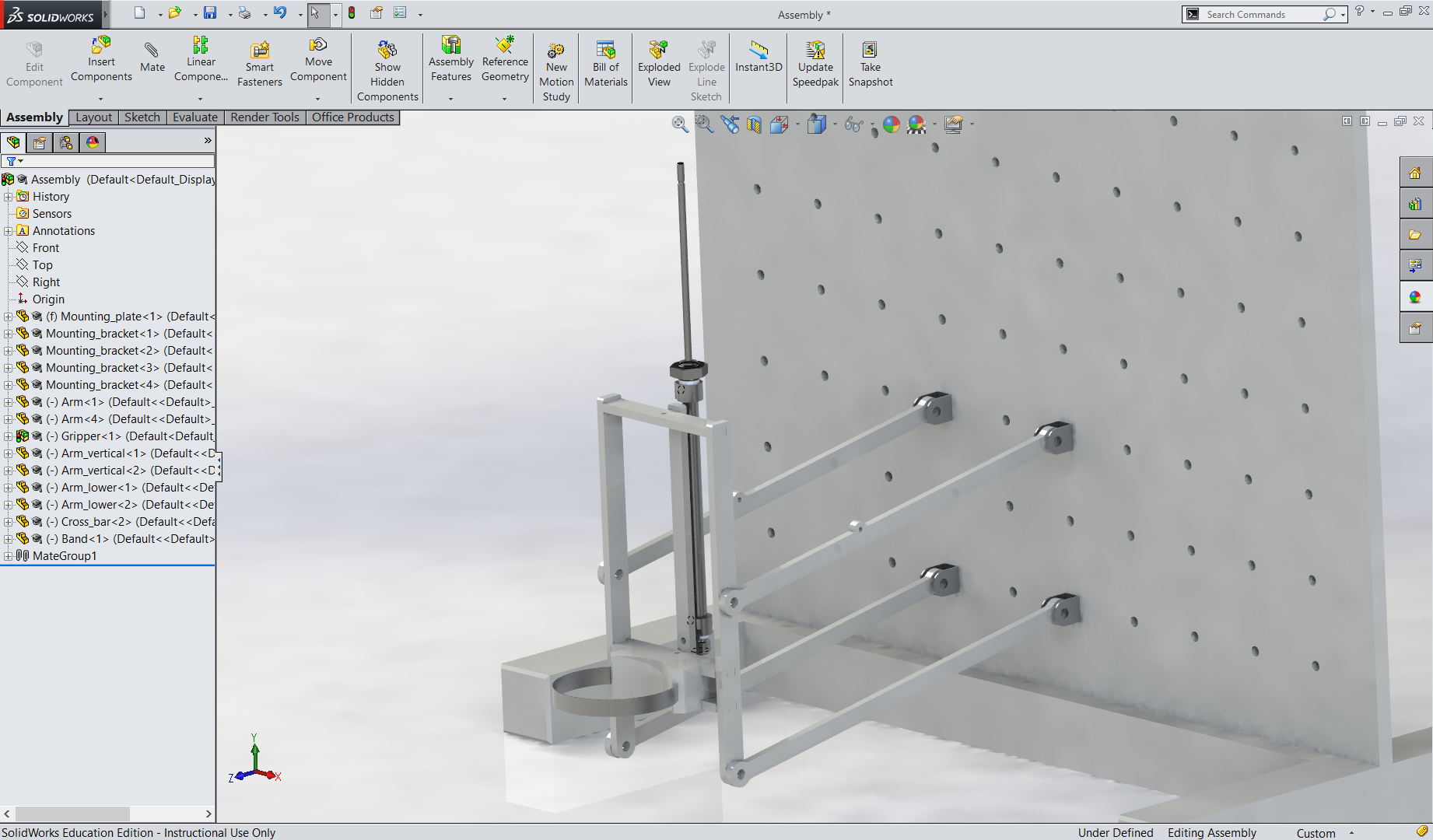
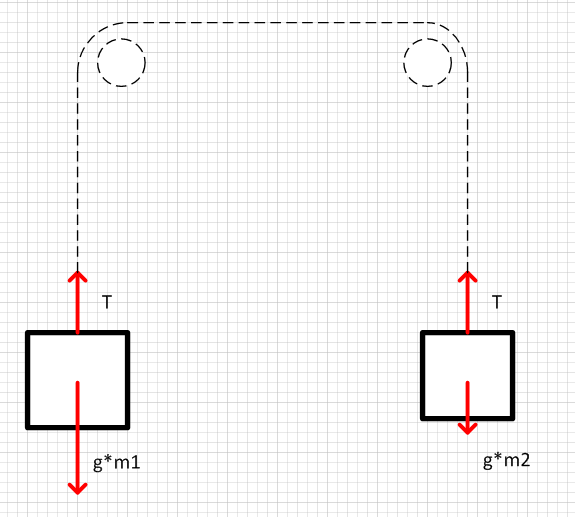
Zoals te zien is in de figuur wordt het systeem in beweging gezet doordat $m1$ net iets groter is dan $m2$. Hieronder wordt berekend wat de maximale snelheid is waarmee $m2$ omhoog wordt gebracht. De bedoeling is dat deze erg laag is. Hieruit blijkt dat de bediening geleidelijk is.
Uit de figuur en de algemene vergelijking:
$$F=m*a$$
Blijkt dat:
$$F1=m1*g-T=m1*a$$
$$F2=m2*g-T=m2*a$$
Waarbij $F1$ en $F2$ de netto krachten zijn die die werken op elke individuele massa.
Hieruit kan worden afgeleid dat:
$$a=g* \frac{m1-m2}{m1+m2}$$
Nu de versnelling bekend is kan met de algemene formule:
$$s=\frac{1}{2}*a*t^2$$
Die omgeschreven wordt tot:
$$t=\sqrt{\frac{2*s}{a}}$$
De tijd die nodig is om het koffiebekertje helemaal op te tillen berekend worden. De afstand is een constante met de waarde 0.25 [$m$].
Nu kan de maximale snelheid berekend worden met:
$$v_{max} = a*t$$
Door de massa te variëren van 0.23 [$kg$] (massa van de grijper) tot 0.73 [$kg$] (massa van de grijper plus het maximale extra gewicht van 0.5 [$kg$]) kan voor elke massa de maximale snelheid worden berekend.
Met Matlab is deze grafiek gerealiseerd waarbij de maximale snelheid op de verticale as staat en het gewicht wat opgetild moet worden op de horizontale as.
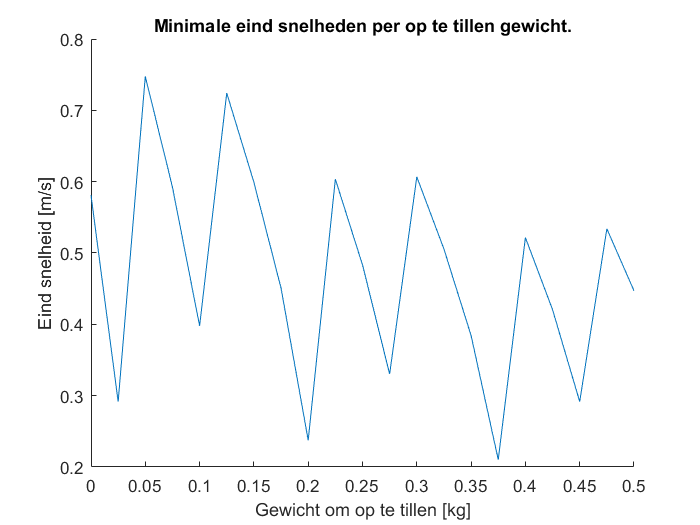
In de grafiek zijn een heleboel pieken en dalen te zien. Dit is te verklaren doordat één staafje een gewicht heeft van 88 gram. De massa van het bekertje met inhoud plus de arm wordt dus opgeheven door een massa die 0 tot 87 gram meer kan zijn dan eigenlijk nodig is om het systeem in beweging te brengen. Hierdoor varieert de snelheid heel erg bij elke meting.
Ook is te zien dat er na elke piek een dal is. Dit is te verklaren doordat elke keer als er één staafje bij komt er in één keer versprongen wordt van een massa die veel meer dan nodig is naar een massa die een klein beetje meer dan nodig is. Bij een grote hoeveelheid overtollige massa wordt de versnelling ook groter waardoor de eindsnelheid ook groter wordt. Bij een kleine hoeveelheid overtollige massa wordt de versnelling veel minder groot waardoor de eindsnelheid ook minder groot wordt.
Als laatste valt op dat de verschillen in snelheid steeds kleiner worden naarmate het gewicht toeneemt. Dit komt doordat de massa van één staafje een steeds kleiner percentage van het gehele gewicht is wat opgetild moet worden. De nauwkeurigheid wordt dus groter waardoor er steeds preciezer naar de minimale eindsnelheid gewerkt kan worden.
De conclusie die we hieruit kunnen trekken is dat de gemiddelde snelheid tussen de 0.22 [m/s] en de 0.75 [m/s] zal liggen. Dit is nog steeds vrij snel maar in de praktijk zal er ook wrijving zijn. De verwachting is dat de wrijving zodanig hoog is dat de maximale snelheid nog meer afneemt. Op deze manier blijkt dat het ontwerp van de Jack the Gripper geleidelijk bediend kan worden.
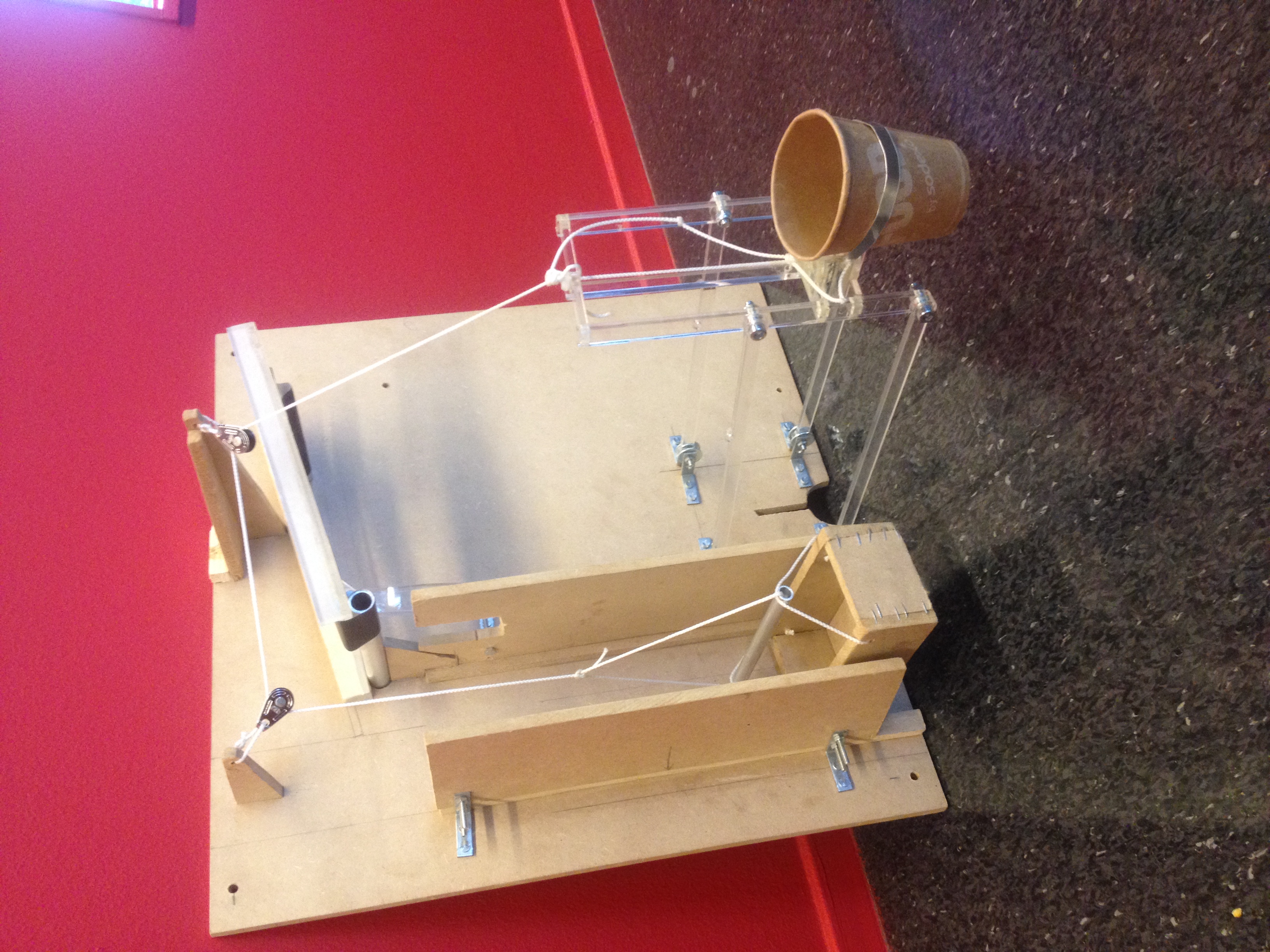
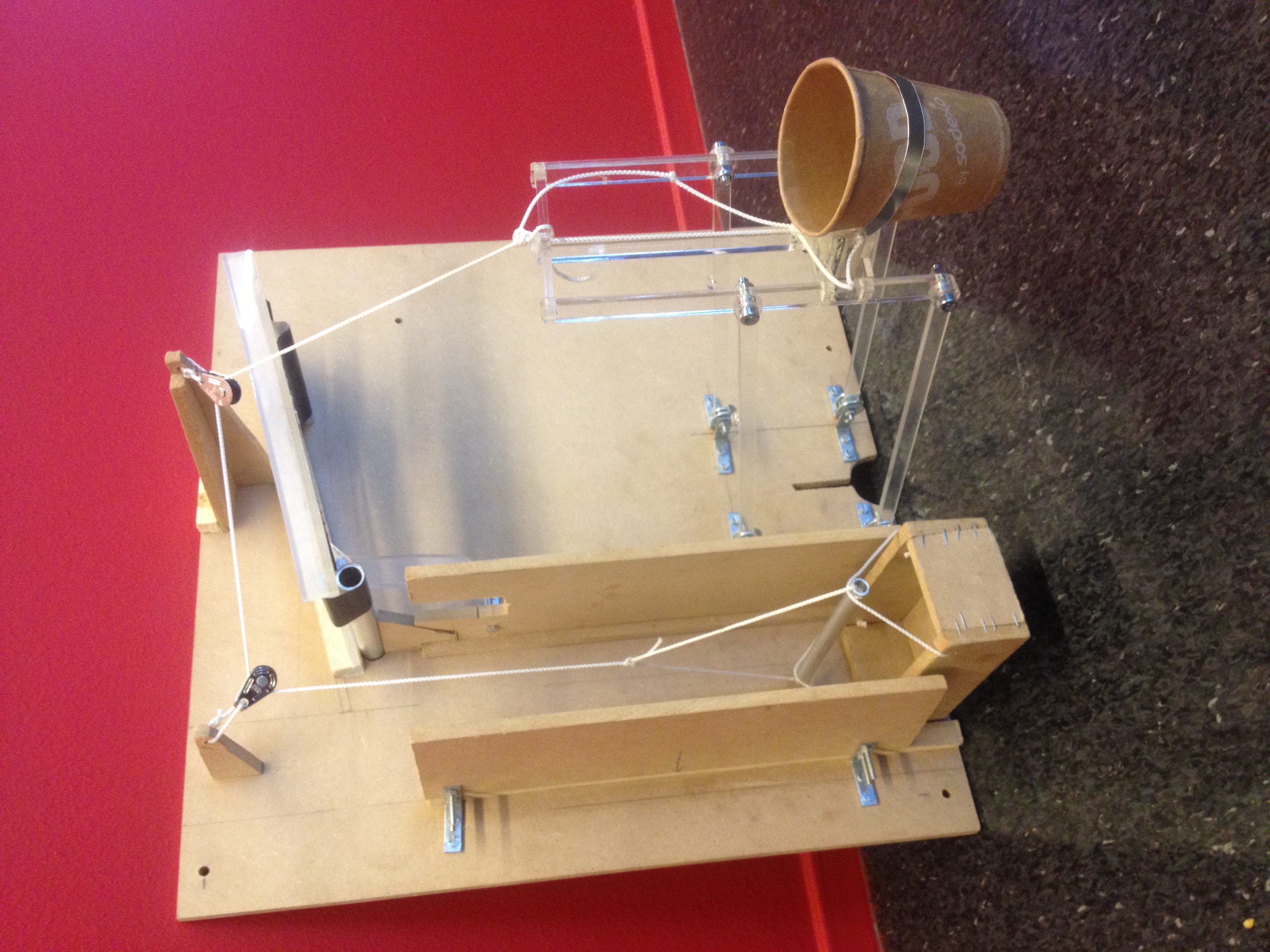
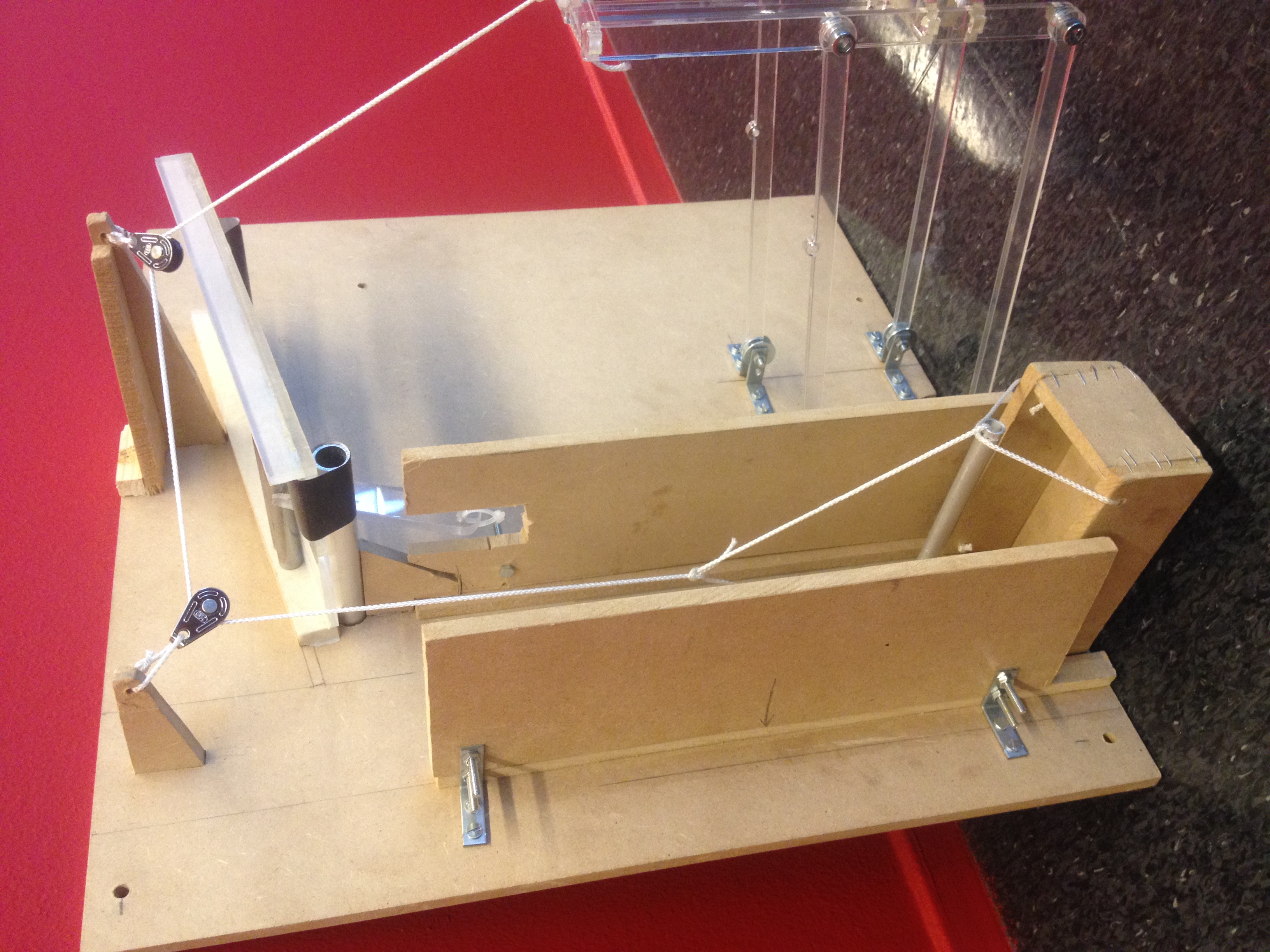
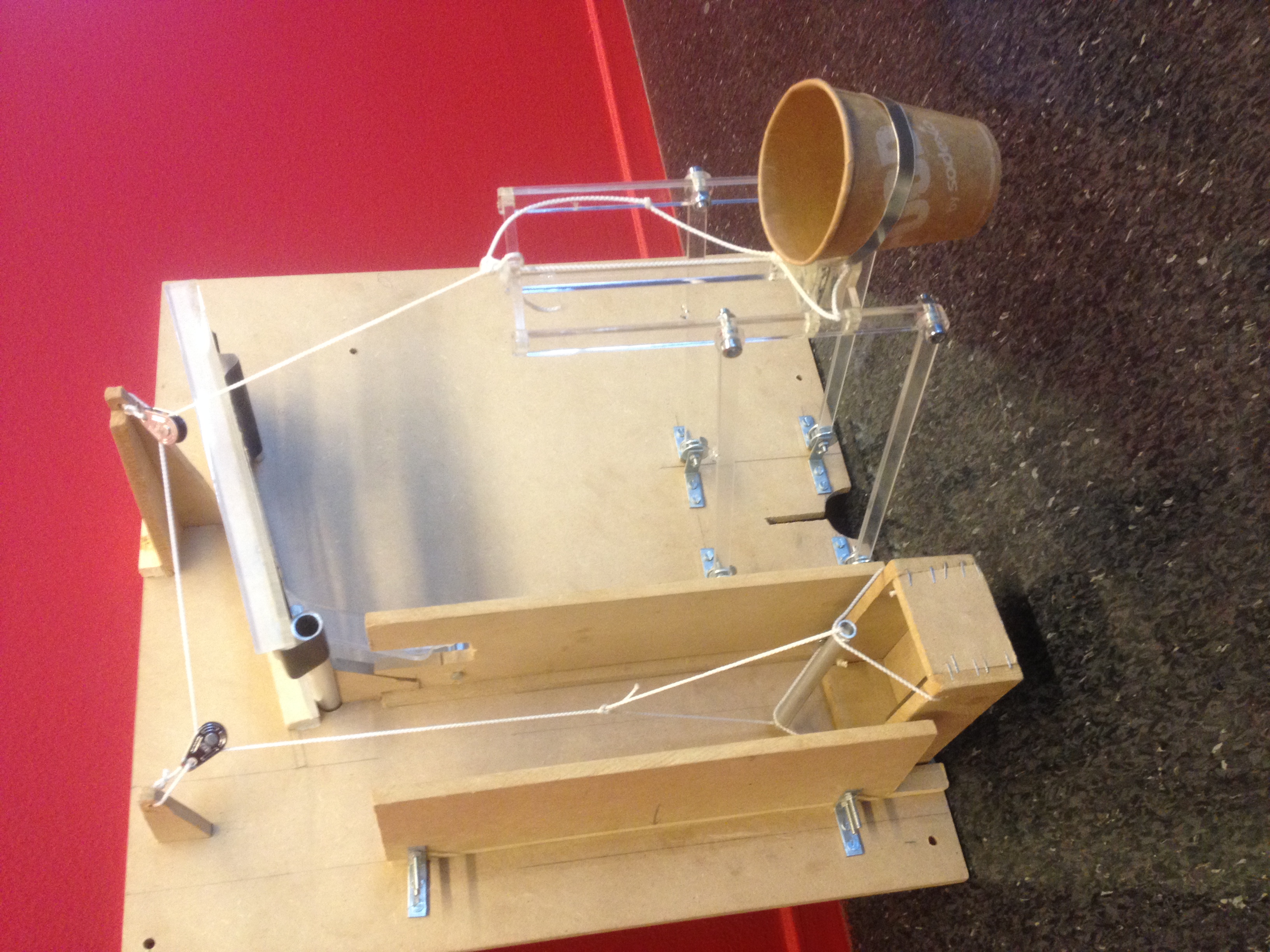
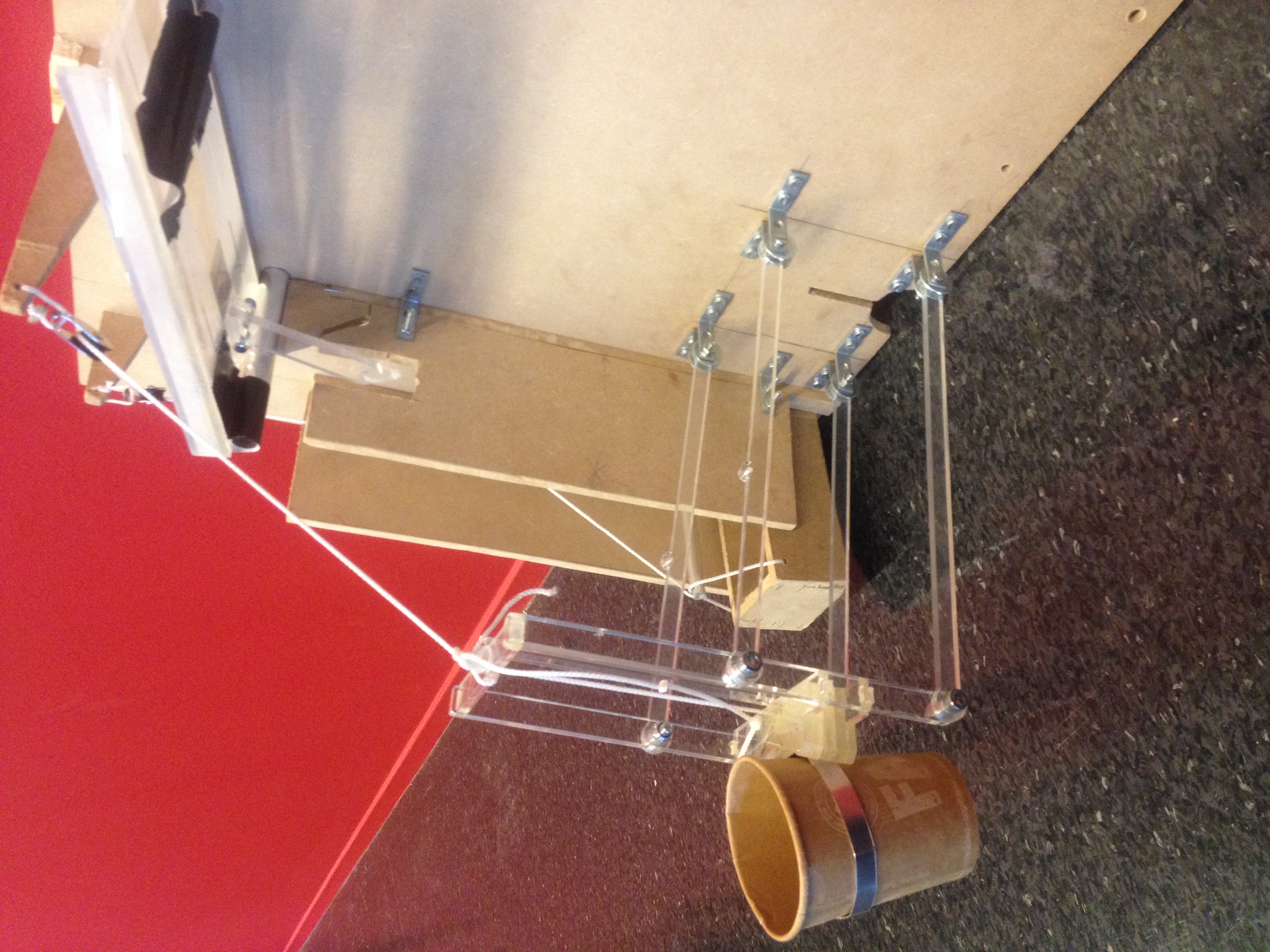
Praktijk
In de praktijk blijkt dat de grijper in stukjes omhoog gaat. Elke keer als er een staafje bij komt wordt de grijper een klein stukje meer opgetild. Op deze manier gaat het systeem dus nog langzamer omhoog waardoor de geleidelijke bediening nog beter is dan verwacht.
Door wrijving en doordat de grijper elke keer een klein stukje verder omhoog gaat is een gemiddelde snelheid van 0.1 [$m/s$] gemeten bij het optillen van een bekertje met daarin drie staafjes van 88 gram. Er werd dus een gewicht van $0.088*3+0.230=0.495$ [$kg$] opgetild waarbij de 0.230 [$kg$] het gewicht van de grijper is.
De massa in het bekertje is dan 0.264 [$kg$]. Uit de grafiek valt af te lezen dat in de theorie dat dit met een snelheid van 0.6 [$m/s$] zou moeten gebeuren.
De snelheid is in praktijk dus 5 lager dan in de theorie. Hieruit blijkt dat de wrijving erg hoog is.
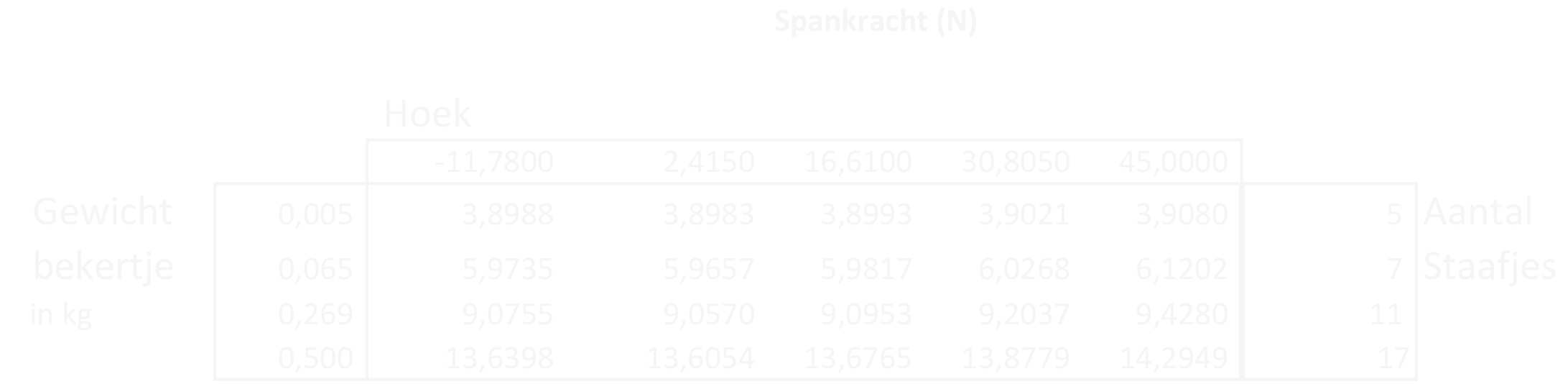
Spankracht
Met behulp van Matlab is voor verschillende hoeken en gewichten de spankracht in het touw berekend. Het resultaat is te zien in de tabel hieronder:
Beweging
Tot slot is er een animatie gemaakt met Matlab waarin de beweging van de grijper wordt uitgebeeld: