

Ontwerpopgaven
Ontwikkeling Film Team Slotwoord
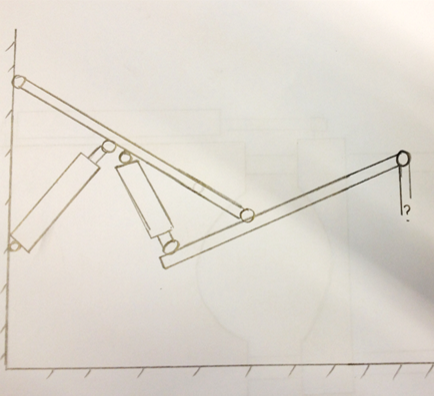
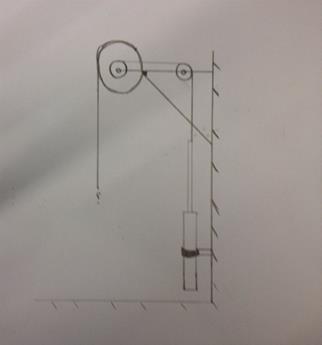
Ontwerpopdracht 1: Ideeën voor de grijper en
arm
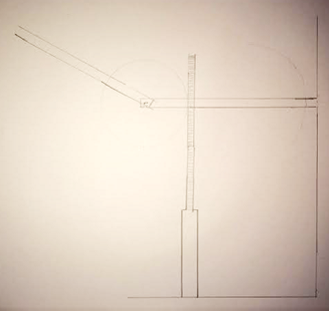
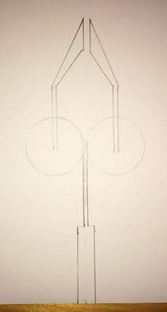
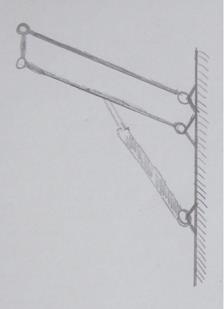
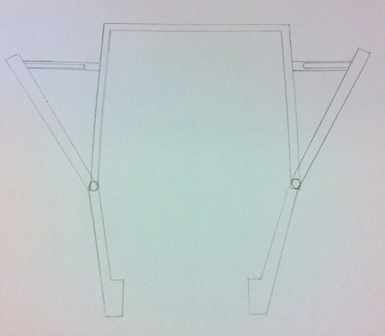
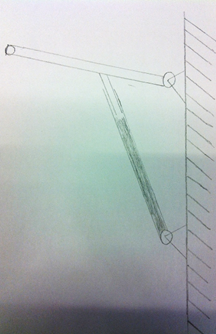
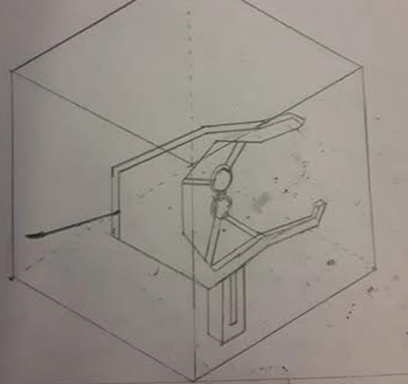
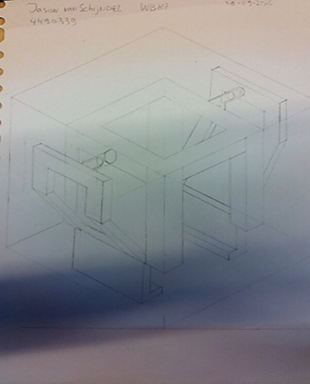
Ontwerpopdracht 2: 3D
handscheten van de grijper
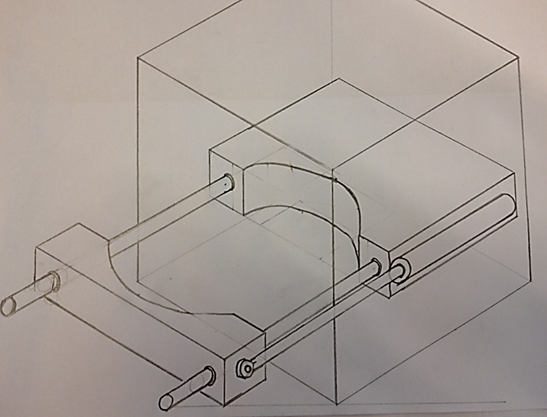
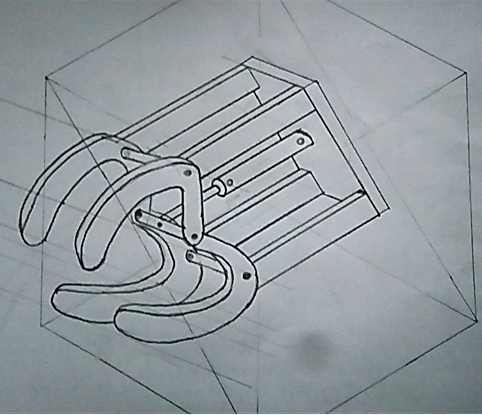
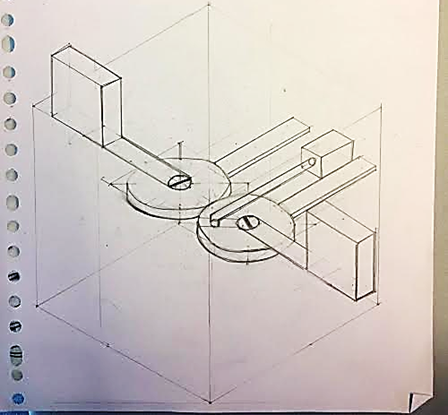
![20151021_161711[1]](Ontwerpopgaven_bestanden/image041.png)
Ontwerpopdracht 3: Selectie
gekozen ontwerpen
Voor onze 3e ontwerpopdracht hebben wij de
mogelijke ontwerpen eerst in een tabel gezet. Daar vervolgens 3 verschillende
combinaties in gemaakt en deze combinaties heeft ieder apart beoordeeld.
De combinaties hebben wij zelf
samengesteld aan de hand van persoonlijke voorkeuren. Vervolgens hebben wij de
verschillende combinaties beoordeeld in een morfologisch overzicht. Hierin
staan de verschillende eisen met daaronder de weegfactor weergegeven. In het
totaal is dan per persoon het aantal punten te lezen wat er aan het ontwerp is
toegekend.
|
Ideeën
deelsystemen |
|
||||||||||
|
Grijper |
Arm/
heffen |
Aandrijving Grijper |
Aandrijving
Arm |
montage |
|
||||||
|
hand
dmv verbonden tandwielen |
Lift |
actuatoren |
actuatoren |
Ducktape |
|
||||||
|
schaar |
hijsen
aan touw |
elastiek |
gewichten |
bouten
en stangen |
|
||||||
|
cirkel
omsluiting |
hefboom |
veren |
Katrollen |
scharnieren |
|
||||||
|
dubbele
schaar zijkant |
dubbele
stang (4-stangen
mechanisme) |
elektromotor |
elastiek |
Zuignappen |
|
||||||
|
inklem
blokken |
Hefarm en lepel eraan, met
hangende grijper |
elektromotor |
touw |
|
|||||||
|
deksel
op bekertje + vierkante grijper |
vaste
arm met daaraan actuator
+ stang |
knex/lego |
|
||||||||
|
Grijper
van boven |
|
||||||||||
|
|
|||||||||||
|
Morfologisch
schema |
|||||||||||
|
Ontwerp
beschrijving |
Kosten |
Stabiliteit |
Design |
hefkracht |
Functioneel |
Productie
gemak/tijd |
beweegsnelheid
controleerbaar |
duurzaamheid |
veiligheid |
totaal |
timo |
|
Puntenfactor |
1 |
5 |
3 |
5 |
5 |
4 |
4 |
5 |
5 |
||
|
4
stangen + grijper zijkant + actuatoren + bouten/stangen |
1 |
2 |
2 |
3 |
3 |
1 |
2 |
3 |
3 |
9.9 |
|
|
hefarm en lepelsteel met hangende grijper + grijper boven + actuatoren +
bouten/stangen |
1 |
3 |
3 |
3 |
2 |
1 |
1 |
3 |
3 |
9.8 |
|
|
lift
systeem + grijper zijkant tandwielen + |
1 |
2 |
3 |
2 |
2 |
1 |
1 |
3 |
3 |
8.7 |
|
|
Ontwerp
beschrijving |
Kosten |
Stabiliteit |
Design |
hefkracht |
Functioneel |
Productie
gemak/tijd |
beweegsnelheid
controleerbaar |
duurzaamheid |
veiligheid |
totaal |
amir |
|
Puntenfactor |
1 |
5 |
3 |
5 |
5 |
4 |
4 |
5 |
5 |
||
|
4
stangen + grijper zijkant + actuatoren + bouten/stangen |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
12,3 |
|
|
hefarm en lepelsteel met hangende grijper + grijper boven + actuatoren + bouten/stangen |
2 |
2 |
2 |
2 |
2 |
1 |
2 |
2 |
3 |
8,3 |
|
|
lift
systeem + grijper zijkant tandwielen + actuatoren/katrollen
+ touw/bouten/stangen |
1 |
2 |
1 |
2 |
2 |
2 |
2 |
3 |
2 |
8,3 |
|
|
Ontwerp
beschrijving |
Kosten |
Stabiliteit |
Design |
hefkracht |
Functioneel |
Productie
gemak/tijd |
beweegsnelheid
controleerbaar |
duurzaamheid |
veiligheid |
totaal |
Joeri |
|
Puntenfactor |
1 |
5 |
3 |
5 |
5 |
4 |
4 |
5 |
5 |
||
|
4
stangen + grijper zijkant + actuatoren + bouten/stangen |
2 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
12,2 |
|
|
hefarm en lepelsteel met hangende grijper + grijper
boven + actuatoren + bouten/stangen |
2 |
2 |
3 |
2 |
2 |
1 |
2 |
2 |
3 |
8,7 |
|
|
lift
systeem + grijper zijkant tandwielen + actuatoren/katrollen
+ touw/bouten/stangen |
1 |
2 |
1 |
2 |
2 |
2 |
1 |
3 |
2 |
7,9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ontwerp
beschrijving |
Kosten |
Stabiliteit |
Design |
hefkracht |
Functioneel |
Productie
gemak/tijd |
beweegsnelheid
controleerbaar |
duurzaamheid |
veiligheid |
totaal |
wessel |
|
Puntenfactor |
1 |
5 |
3 |
5 |
5 |
4 |
4 |
5 |
5 |
||
|
4
stangen + grijper zijkant + actuatoren + bouten/stangen |
1 |
3 |
2 |
3 |
3 |
3 |
3 |
3 |
2 |
11,2 |
|
|
hefarm en lepelsteel met hangende grijper + grijper
boven + actuatoren + bouten/stangen |
1 |
1 |
3 |
3 |
1 |
2 |
2 |
3 |
2 |
8,4 |
|
|
lift
systeem + grijper zijkant tandwielen + actuatoren/katrollen
+ touw/bouten/stangen |
1 |
2 |
1 |
2 |
2 |
1 |
1 |
2 |
3 |
7,4 |
|
|
Ontwerp
beschrijving |
Kosten |
Stabiliteit |
Design |
hefkracht |
Functioneel |
Productie
gemak/tijd |
beweegsnelheid
controleerbaar |
duurzaamheid |
veiligheid |
totaal |
Jason |
|
Puntenfactor |
1 |
5 |
3 |
5 |
5 |
4 |
4 |
5 |
5 |
||
|
4
stangen + grijper zijkant + actuatoren + bouten/stangen |
2 |
3 |
3 |
3 |
3 |
2 |
3 |
3 |
3 |
11,8 |
|
|
hefarm en lepelsteel met hangende grijper + grijper boven + actuatoren + bouten/stangen |
3 |
3 |
3 |
3 |
2 |
2 |
1 |
2 |
2 |
9,3 |
|
|
lift
systeem + grijper zijkant tandwielen + actuatoren/katrollen + touw/bouten/stangen |
1 |
1 |
2 |
2 |
3 |
2 |
2 |
2 |
2 |
8,1 |
|
|
Ontwerp
beschrijving |
Kosten |
Stabiliteit |
Design |
hefkracht |
Functioneel |
Productie gemak/tijd |
beweegsnelheid
controleerbaar |
duurzaamheid |
veiligheid |
totaal |
Daan |
|
Puntenfactor |
1 |
5 |
3 |
5 |
5 |
4 |
4 |
5 |
5 |
||
|
4
stangen + grijper zijkant + actuatoren + bouten/stangen |
2 |
3 |
2 |
2 |
3 |
2 |
2 |
2 |
2 |
9.3 |
|
|
hefarm en lepelsteel met hangende grijper + grijper boven + actuatoren + bouten/stangen |
2 |
3 |
2 |
2 |
3 |
1 |
1 |
2 |
2 |
8.4 |
|
|
lift
systeem + grijper zijkant tandwielen + actuatoren/katrollen
+ touw/bouten/stangen |
3 |
3 |
1 |
2 |
3 |
2 |
3 |
3 |
3 |
10.7 |
|
In ons morfologisch overzicht is af te lezen dat 5 van de
6 groepsleden voorkeur gaven aan de grijper bestaande uit:
·
het
vierstangenmechanisme
·
een grijper die de
beker vanaf de zijkant pakt
·
het mechanisme opgebouwd
uit stangen (die bestaan uit o.a. hout, perspex, metaal)
·
Bevestigd met bouten
en moeren
·
aangedreven door
actuatoren
Met dit idee zijn wij vervolgens verder gegaan om het uit
te werken naar een ontwerp wat gerealiseerd kan worden
Ontwerpopdracht 4: Fabricage
ontwerp
Ontwerpopdracht 4 bestond uit het maken van de grijper.
Voor het maken van de grijper werd ons een perspexplaat ter beschikking
gesteld. Uit deze plaat konden wij met behulp van lasersnijden de gewenste onderdelen
van de grijper halen. Vervolgens zijn wij verschillende malen naar de AWS en de
IWS gegaan om de onderdelen in elkaar te zetten en de laatste houten onderdelen
te vervaardigen. Een meer gedetailleerd overzicht van de fabricage is te zien
in ontwikkeling
Ontwerpopdracht 5: Practicum
& Testen ontwerp
|
Wat gemeten |
Meting 1 |
Meting 2 |
Meting 3 |
|
Maximale breedte bek |
16.5 |
16.5 |
16.6 |
|
Hoogte van liften |
25.6 |
25.5 |
25.5 |
|
Maximale hefkracht |
0.5kg< |
0.5< |
0.5< |
|
Maximale grijpkracht |
4kg< |
4kg< |
4kg< |
|
Bekertje 10 sec vasthouden |
CHECK |
||
|
Van hoogste stand naar beneden bewegen en bekertje van tafel oppakken |
Lastig, maar als het bekertje op de goede plek staat lukt het wel! (zie filmpje) |
||
|
Voorwerp |
Kan optillen + inhoud behouden |
|
|
|
|
Standaard drinkbekertje leeg |
Ja/ |
|
Bekertje met potloden |
Ja/ |
|
Bekertje met zand |
Ja/ |
|
Flesje met water |
Ja/ |
|
Bekertje met water |
Ja/ |
|
Heineken pils glas |
Ja/ |
|
Bekertje met materialen en gereedschap |
Ja/ |
Ontwerpopdracht 6: Website
maken
In ontwerpopdracht 6 werd ons gevraagd een website te
maken met daarop de verschillende onderdelen en ontwerpstappen die wij gemaakt
hebben.
Voor het ontwikkelen van de website hebben wij ook
verschillende keuzes en stappen moeten maken.
Snel, overzichtelijk en toegankelijk
Alle onderdelen van de deelopgaven
De website moet een filmpje bevatten van de werking van de grijper
Te ontwikkelen in zeer korte tijd (< week)
Geschikt
voor medestudenten ter informatie van ons project
Voor
het maken van de website hebben wij gebruik gemaakt van Microsoft office word.
Vervolgens deze pagina opgeslagen als .htm zodat die
als website gebruikt kon worden. De keuze voor het gebruik van Word voor de
website legde wel enkele beperkingen op in onze mogelijkheden qua uiterlijk en
presentatie, maar wij achtte word toch als beste methode in verband met de
gestelde tijdsperiode.