Om tot een uiteindelijk ontwerp te komen hebben alle groepsleden individueel een uniek ontwerp gemaakt. Uit deze concepten hebben we door te combineren ons uiteindelijke ontwerp gevormd.
Concept Tom Friederich
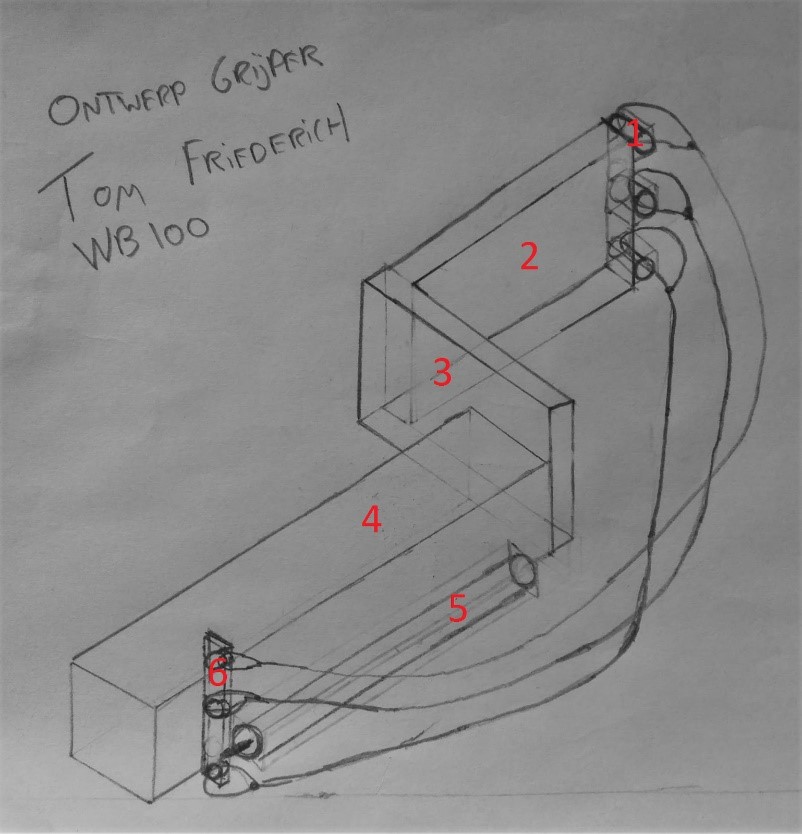 Dit concept werkt aan de hand van meerdere stukken elastiek. Het elastiek zit bij punt 1 vast aan plaat 2. Het elastiek wordt strakgetrokken door de actuator (5), en het voorwerp wordt tegen de plaat 3 gedrukt. Het elastiek kan zich aanpassen aan de vorm van het te grijpen voorwerp.
De grootste voordelen van dit ontwerp zijn dat het voorwerp goed vast komt te zitten in de hand en dat de knijpbeweging goed te combineren is met een eventuele voorwaartse beweging van de hand. Het ontwerp is ook makkelijk en goedkoop te fabriceren.
Het grootste nadeel van dit concept is dat de enige manier om de elastiekjes om het voorwerp te krijgen van boven is. Dit betekent dat je de arm van bovenaf precies om het voorwerp heen moet krijgen. Dit is dan ook de belangrijkste reden dat we niet voor dit ontwerp hebben gekozen.
Dit concept werkt aan de hand van meerdere stukken elastiek. Het elastiek zit bij punt 1 vast aan plaat 2. Het elastiek wordt strakgetrokken door de actuator (5), en het voorwerp wordt tegen de plaat 3 gedrukt. Het elastiek kan zich aanpassen aan de vorm van het te grijpen voorwerp.
De grootste voordelen van dit ontwerp zijn dat het voorwerp goed vast komt te zitten in de hand en dat de knijpbeweging goed te combineren is met een eventuele voorwaartse beweging van de hand. Het ontwerp is ook makkelijk en goedkoop te fabriceren.
Het grootste nadeel van dit concept is dat de enige manier om de elastiekjes om het voorwerp te krijgen van boven is. Dit betekent dat je de arm van bovenaf precies om het voorwerp heen moet krijgen. Dit is dan ook de belangrijkste reden dat we niet voor dit ontwerp hebben gekozen.
Concept Teun
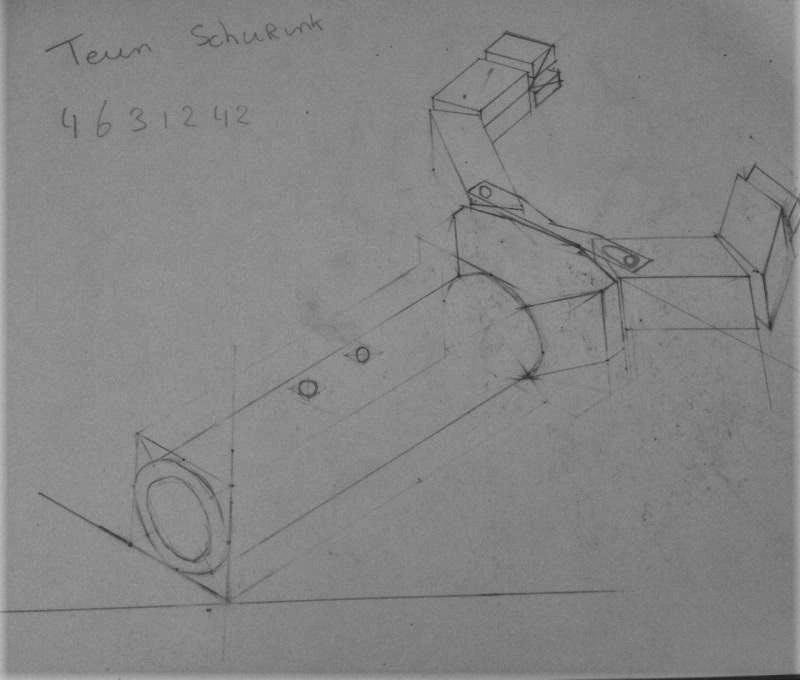 Dit concept is gebaseerd op de menselijke anatomie. De vingers bestaan uit verschillende onderdelen die vergelijkbaar zijn met kootjes van het menselijke hand. De grijper bestaat uit twee vingers, beide vingers bestaan uit 3 kootjes, die met elkaar verbonden zijn door scharnieren. Beide laatste kootjes zijn gekarteld zodat ze in elkaar kunnen klappen. De aansturing van de vingers vindt plaats doordat er aan de binnenkant van de vinger een draadje loopt die aan de actuator is bevestigd. Dit draadje is vastgemaakt aan het laatste kootje. Bij de andere kootjes loopt het touw door een overdekte gleuf zodat het touwtje ook kracht kan uitoefenen op deze kootjes. Om de te zorgen dat de hand niet dicht blijft nadat de actuator aangespannen is geweest ,zijn aan de buitenkant van de vingers veertjes bevestigd om te zorgen dat de hand weer naar de uitgangspositie gaat.
Het grootste voordeel van dit ontwerp is dat de hand, doordat de vingerkootjes los zijn, zich goed om ieder voorwerp kan krullen. Nadeel is dat de veertjes om terug te gaan naar uitgangspositie precies de goede afmetingen en sterkte moeten hebben, daarnaast is het relatief moeilijk te produceren.
Dit concept is gebaseerd op de menselijke anatomie. De vingers bestaan uit verschillende onderdelen die vergelijkbaar zijn met kootjes van het menselijke hand. De grijper bestaat uit twee vingers, beide vingers bestaan uit 3 kootjes, die met elkaar verbonden zijn door scharnieren. Beide laatste kootjes zijn gekarteld zodat ze in elkaar kunnen klappen. De aansturing van de vingers vindt plaats doordat er aan de binnenkant van de vinger een draadje loopt die aan de actuator is bevestigd. Dit draadje is vastgemaakt aan het laatste kootje. Bij de andere kootjes loopt het touw door een overdekte gleuf zodat het touwtje ook kracht kan uitoefenen op deze kootjes. Om de te zorgen dat de hand niet dicht blijft nadat de actuator aangespannen is geweest ,zijn aan de buitenkant van de vingers veertjes bevestigd om te zorgen dat de hand weer naar de uitgangspositie gaat.
Het grootste voordeel van dit ontwerp is dat de hand, doordat de vingerkootjes los zijn, zich goed om ieder voorwerp kan krullen. Nadeel is dat de veertjes om terug te gaan naar uitgangspositie precies de goede afmetingen en sterkte moeten hebben, daarnaast is het relatief moeilijk te produceren.
Concept Ferry
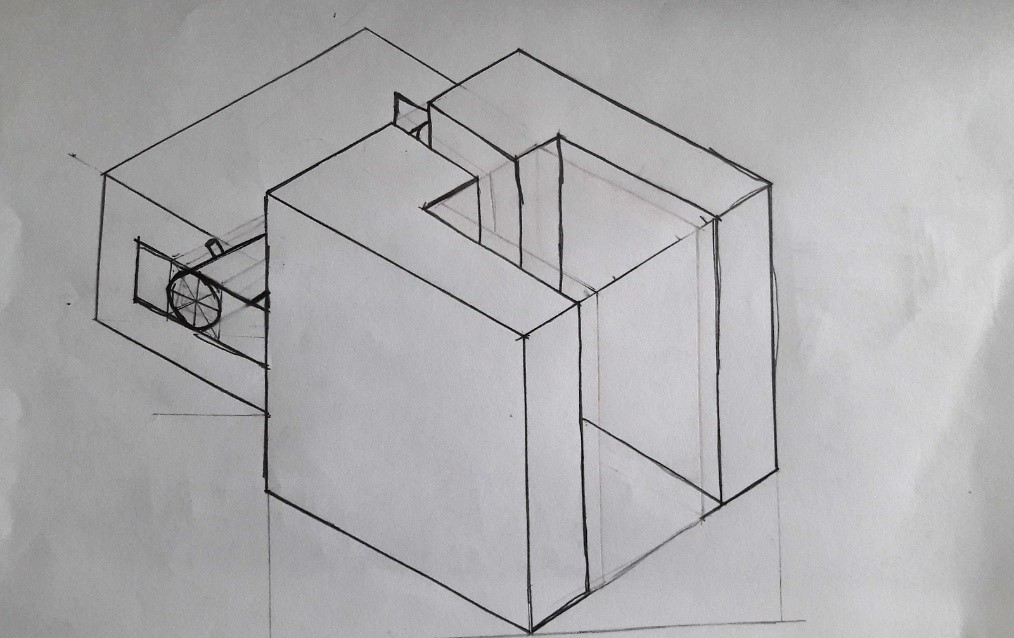 Dit concept bestaat uit twee losse delen: twee even grote 'vingers'. Achter deze vingers wordt de actuator bevestigd. De actuator duwt de twee vingers naar buiten waardoor de ruimte tussen de vingers groter wordt.
Een groot voordeel aan dit ontwerp is dat het heel erg simpel te maken is. Ook de actuator is heel simpel vast te maken. Een nadeel kan zijn dat de voorwerpen die opgepakt moeten worden, samengeknepen kunnen worden doordat de kracht die de vingers uitoefenen te groot is.
Dit concept bestaat uit twee losse delen: twee even grote 'vingers'. Achter deze vingers wordt de actuator bevestigd. De actuator duwt de twee vingers naar buiten waardoor de ruimte tussen de vingers groter wordt.
Een groot voordeel aan dit ontwerp is dat het heel erg simpel te maken is. Ook de actuator is heel simpel vast te maken. Een nadeel kan zijn dat de voorwerpen die opgepakt moeten worden, samengeknepen kunnen worden doordat de kracht die de vingers uitoefenen te groot is.
Concept Adrian
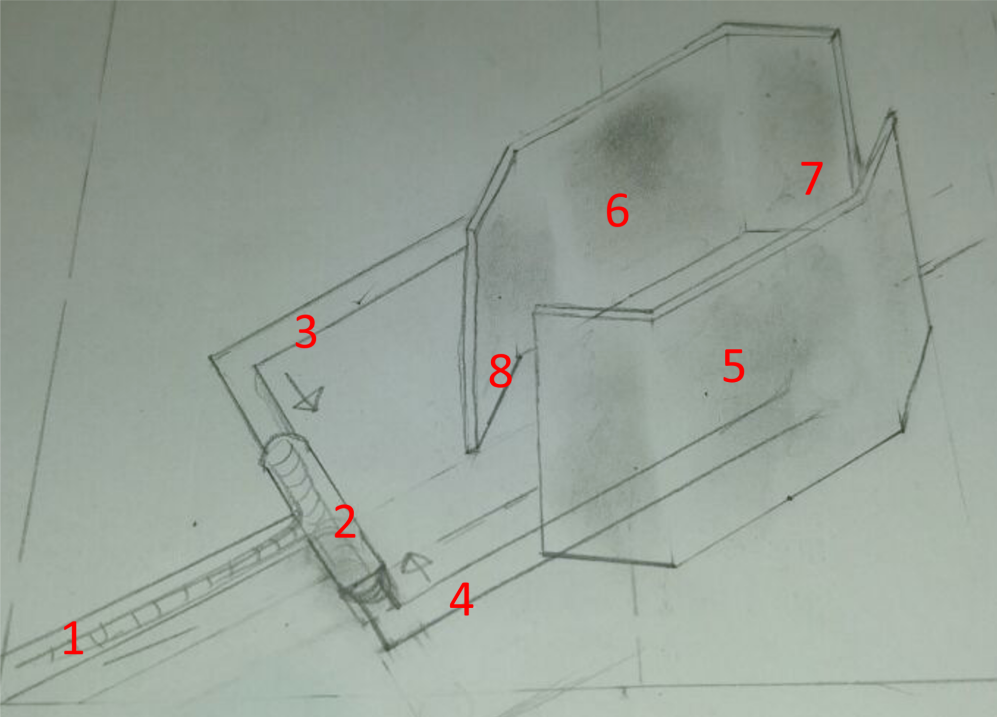 Dit concept bestaat uit twee losse vingers (5&6) die naar elkaar worden getrokken met een actuator(5). De 2 stangen (3&4) worden aan elkaar met touw vastgemaakt. Als de actuator bij 1 trekt, worden de 2 stangen tegelijkertijd (met evenveel kracht) naar elkaar getrokken. De vlakken 7 en 8 staan onder een nader te bepalen hoek. Deze vlakken zorgen ervoor dat een voorwerp niet aan de zijkant uit de grijper springt.
Voordelen van dit ontwerp zijn dat vierkante vormen makkelijk opgepakt kunnen worden. Het ontwerp is ook simpel en eenvoudig te maken.Het grootste nadeel van dit ontwerp is dat erg kleine objecten niet opgepakt kunnen worden omdat 5 en 6 niet volledig tegen elkaar aan kunnen door de vlakken 7 en 8 .
Dit concept bestaat uit twee losse vingers (5&6) die naar elkaar worden getrokken met een actuator(5). De 2 stangen (3&4) worden aan elkaar met touw vastgemaakt. Als de actuator bij 1 trekt, worden de 2 stangen tegelijkertijd (met evenveel kracht) naar elkaar getrokken. De vlakken 7 en 8 staan onder een nader te bepalen hoek. Deze vlakken zorgen ervoor dat een voorwerp niet aan de zijkant uit de grijper springt.
Voordelen van dit ontwerp zijn dat vierkante vormen makkelijk opgepakt kunnen worden. Het ontwerp is ook simpel en eenvoudig te maken.Het grootste nadeel van dit ontwerp is dat erg kleine objecten niet opgepakt kunnen worden omdat 5 en 6 niet volledig tegen elkaar aan kunnen door de vlakken 7 en 8 .