De realisatie van de grijper
 het uiteindelijke frame is gemaakt van staal en dat is aan elkaar gelast. Een rails lopen verticaal. Hierop is het karretje bevestigd deze rails verzorgt de horizontale verplaatsing. De andere rails lopen loopt haaks op deze rails. De rails waar niet het karretje op bevestigd is, verzorgt de verticale verplaatsing. Op het karretje wordt met een beugel de arm van de grijper bevestigd. Zo kan de grijper alle posities in een bepaald vlak aannemen. Om de verticale beweging mogelijk te maken wordt er gebruik gemaakt van kattrolletjes. Deze worden aan het frame gehangen aan de boorgaten die eerder zijn gemaakt. Voor de horizontale beweging waren geen katrolletjes nodig en werd de actuator door middel van een touwtje aan het karretje bevestigd . Echter was er voor de horizontale beweging wel een tegenkracht nodig die ervoor zorgde dat het karretje na ontspannen van de actuator weer terug ging naar de beginpositie. Daarom werd er een elastiek gespannen tussen de uiteinde van de rails en het karretje.
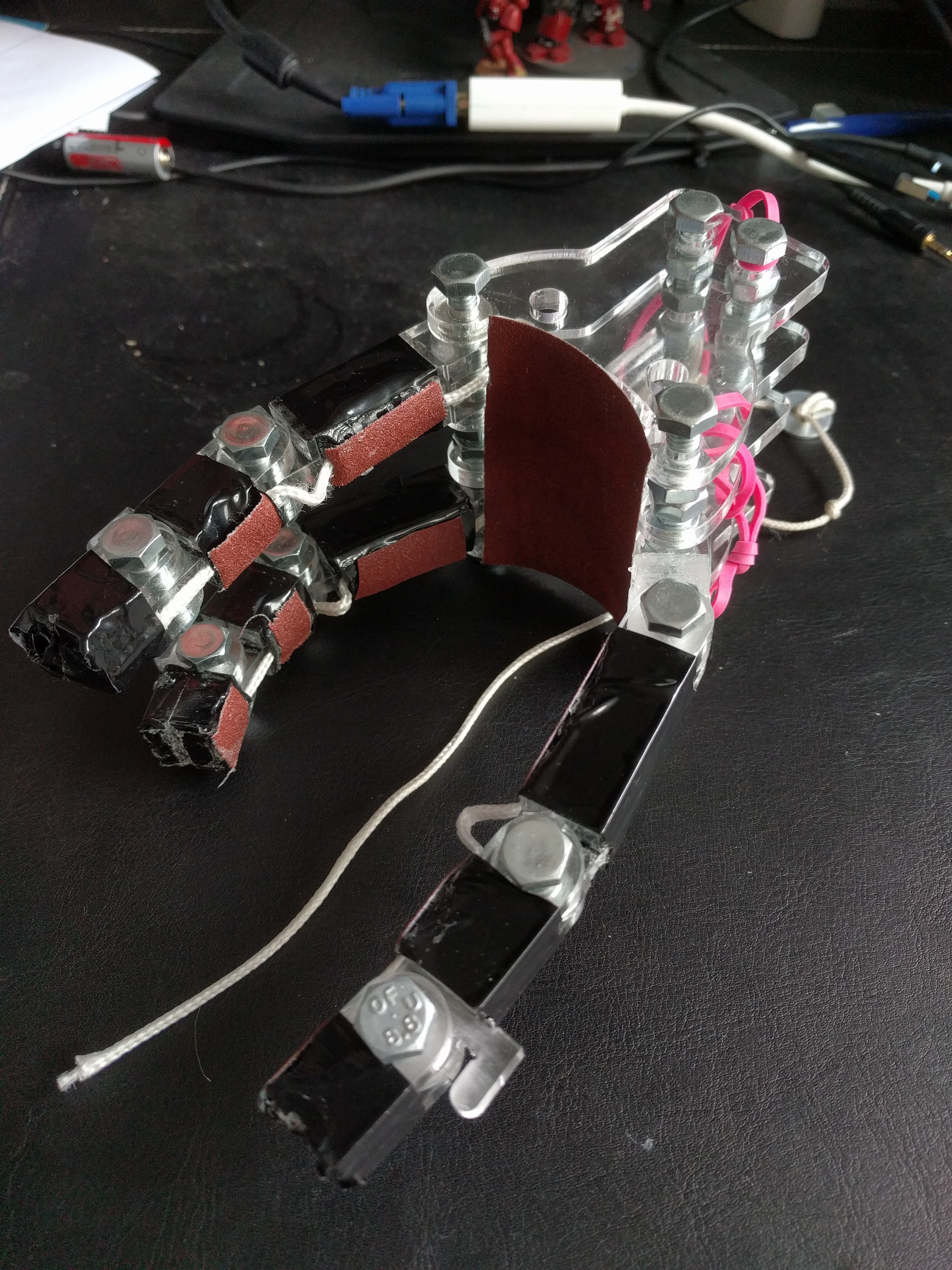
Ook de hand werd aan de arm bevestigd. Dit gebeurde doordat de arm ingeklemd werd tussen twee lagen plexiglas van de hand. Om voor extra stevigheid te zorgen werd er ook een tie wrap aangebracht. De hand is opgebouwd vanuit de onderdelen die we uit het plexiglas hebben gesneden. Eerst hebben we de kootjes gemaakt door drie lagen plexiglas aan elkaar te lijmen. Vervolgens hebben we de hele hand in elkaar gezet door middel van bouten en moeren. Om te zorgen dat de hand weer open ging na het maken van een vuist. Werd er aan de buiten kan elastiekjes aangebracht. Aan de binnenkant werd zoals uitgelegd de touwtjes bevestigd en uiteindelijk werden de touwtjes aan elkaar geknoopt zodat er op elke vinger de bedoelde kracht kwam te staan als het touwtje werd aangetrokken.
het uiteindelijke frame is gemaakt van staal en dat is aan elkaar gelast. Een rails lopen verticaal. Hierop is het karretje bevestigd deze rails verzorgt de horizontale verplaatsing. De andere rails lopen loopt haaks op deze rails. De rails waar niet het karretje op bevestigd is, verzorgt de verticale verplaatsing. Op het karretje wordt met een beugel de arm van de grijper bevestigd. Zo kan de grijper alle posities in een bepaald vlak aannemen. Om de verticale beweging mogelijk te maken wordt er gebruik gemaakt van kattrolletjes. Deze worden aan het frame gehangen aan de boorgaten die eerder zijn gemaakt. Voor de horizontale beweging waren geen katrolletjes nodig en werd de actuator door middel van een touwtje aan het karretje bevestigd . Echter was er voor de horizontale beweging wel een tegenkracht nodig die ervoor zorgde dat het karretje na ontspannen van de actuator weer terug ging naar de beginpositie. Daarom werd er een elastiek gespannen tussen de uiteinde van de rails en het karretje.
Ook de hand werd aan de arm bevestigd. Dit gebeurde doordat de arm ingeklemd werd tussen twee lagen plexiglas van de hand. Om voor extra stevigheid te zorgen werd er ook een tie wrap aangebracht. De hand is opgebouwd vanuit de onderdelen die we uit het plexiglas hebben gesneden. Eerst hebben we de kootjes gemaakt door drie lagen plexiglas aan elkaar te lijmen. Vervolgens hebben we de hele hand in elkaar gezet door middel van bouten en moeren. Om te zorgen dat de hand weer open ging na het maken van een vuist. Werd er aan de buiten kan elastiekjes aangebracht. Aan de binnenkant werd zoals uitgelegd de touwtjes bevestigd en uiteindelijk werden de touwtjes aan elkaar geknoopt zodat er op elke vinger de bedoelde kracht kwam te staan als het touwtje werd aangetrokken.
Hieronder is een korte video gemaakt van de grijper en de werking ervan met perslucht