
Keuzeproces
Wij hadden ons conceptontwerp in drie onderdelen gesplitst: het mechanisme dat de grijper verticaal beweegt, het mechanisme dat de grijper zijwaarts beweegt en het mechanisme van de grijper zelf. Voor elk onderdeel hadden we drie verschillende opties besproken die allemaal voldeden aan de eisen die wij aan ons ontwerp hadden gesteld. Om te beslissen welke combinatie van onderdelen ons uiteindelijke ontwerp zullen vormen, hebben we elk van de opties op vijf criteria beoordeeld:
- Complexiteit (Hoe moeilijk het is om het ontwerp te realiseren)
- Bevestiging actuatoren (of de actuatoren snel genoeg bevestigd kunnen worden)
- Effectiviteit (in hoeverre het mechanisme de benodigde hoogte/hoek/contactoppervlak)
- Bevestiging aan arm (hoe stevig het mechanisme aan de arm kan worden bevestigd)
- Krachtenverdeling (in hoeverre de arm en de andere onderdelen worden belast)
Schetsen van verschillende ontwerpen
verticaal ontwerp 1:
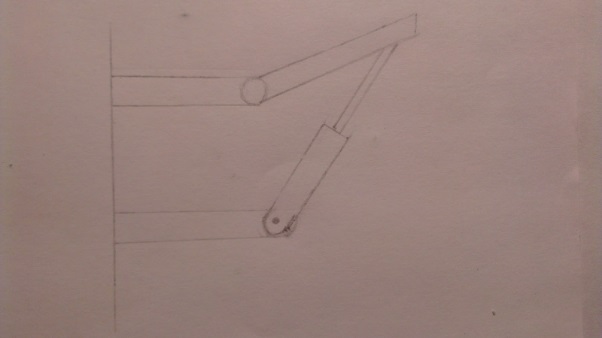
Dit mechanisme is met twee horizontale stangen vastgemaakt aan het frame. In de bovenste stang zit een scharnierpunt waardoor de rechterhelft kan roteren in de y-richting. De actuator is met de onderkant scharnierend vastgemaakt aan de onderste stang en met het uiteinde van de zuigerstang vastgemaakt aan de bovenste stang. Wanneer de actuator uitschuift zal de rechter helft van de bovenste stang omhoog bewegen.
verticaal ontwerp 2:
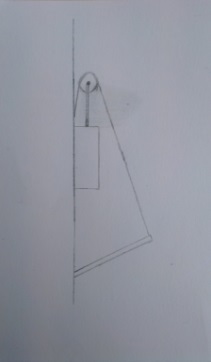
De actuator Is hier met de zijkant van de zuiger vastgemaakt aan het frame. Het uiteinde van de zuigerstang zit vast aan het middelpunt van de katrol die samen in verticale richting kunne bewegen. Door middel van een touw dat vast zit aan het frame en wat via een katrol verbonden is aan de stang onder de actuator. Wanneer de zuigerstang uitschuift zal de arm van de grijper hierdoor dus ook omhoog bewegen.
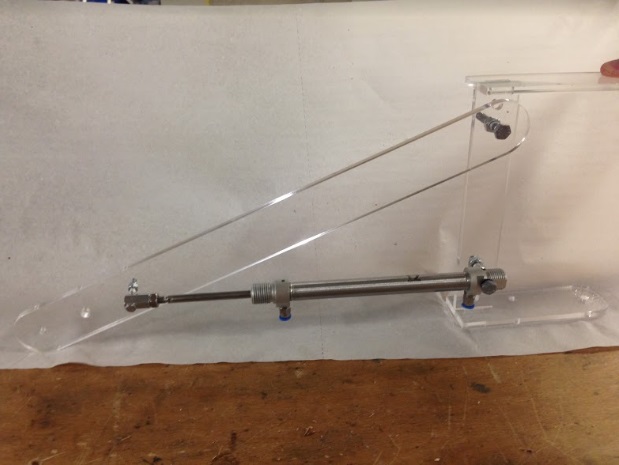
verticaal ontwerp 3 en tevens horizontaal ontwerp 1:
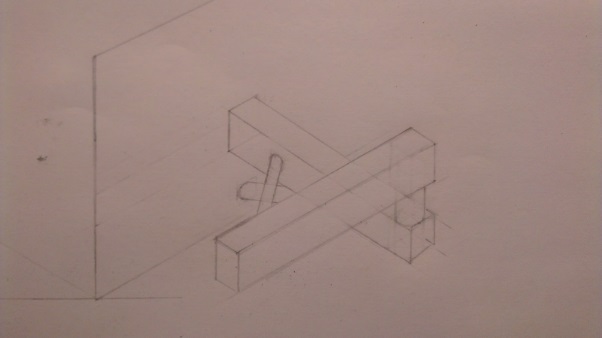
Dit mechanisme kan in de horizontale en verticale richting bewegen. Een houten arm zit met de achterkant vast aan het frame en kan met een eveneens aan het frame vastgemaakte actuator omhoog worden bewogen.
De tweede actuator zit vast aan de zijkant van de arm die verticaal beweegt en aan de arm die in de horizontale richting beweegt. De twee armen zitten scharnierend aan elkaar vast door middel van een pin die door beide heen gaat. Als de tweede actuator uitschuift, kan de tweede arm hierdoor opzij bewegen.
Horizontaal ontwerp 2:
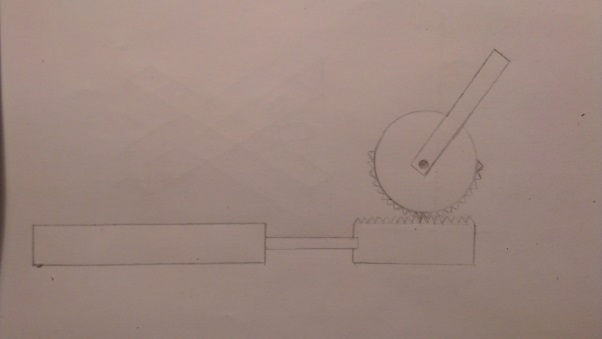
In dit mechanisme wordt door middel van een tandwieloverbrenging gezorgt dat de arm die vastzit aan de draaischijf horizontaal kan bewegen. Dit is een bovenaanzicht.
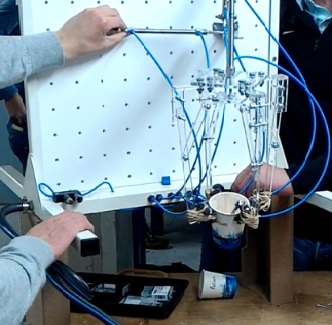
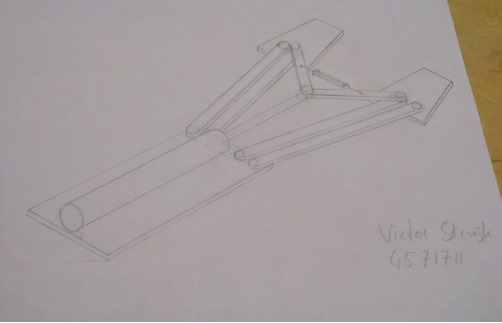
Horizontaal ontwerp 3 en tevens grijper ontwerp 1:

Aan twee beugels worden, loodrecht op het frame, twee stangen van perspex gehangen. Tussen deze twee stangen zit een derde stang en het geheel kan opzij worden bewogen door een actuator die vastzit aan een derde beugel.
De grijper werkt volgens het schaar principe waarin de twee vingers elkaar kruisen in een scharnierpunt. Achter dit scharnierpunt zit een actuator die de vingers naar elkaar toe kunnen bewegen.
Grijper ontwerp 2:
In dit grijper mechanisme trekt zuigerstang van de actuator aan twee stangen waardoor deze naar achter bewegen. In deze beweging worden de twee platen naar elkaar toegetrokken waardoor er een voorwerp kan worden vastgeklemd
Grijper ontwerp 3:
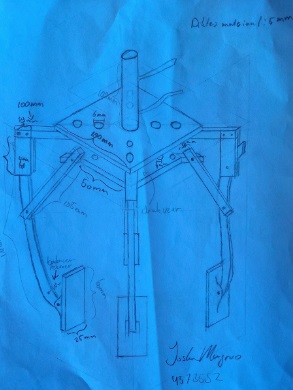
Deze grijper werkt op het principe van een poliepgrijper. De actuator die in de bovenste plaat zit voert met zijn zuigerstang een kracht uit op de onderste plaat waardoor de klauwen van de grijper naar buiten worden gedrukt.
Keuze
Alle opties kregen 1, 2 of 3 punten en elk criterium kreeg een weegfactor, hieronder volgen tabellen met onze beoordelingen van de verschillende opties.
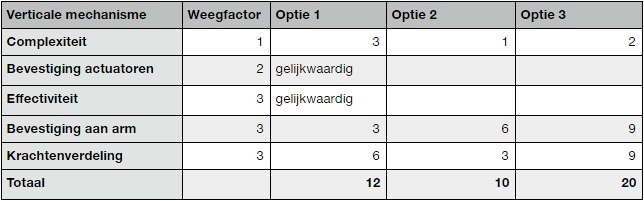
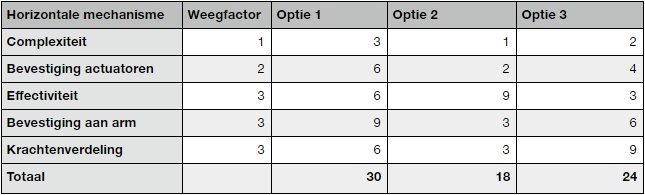
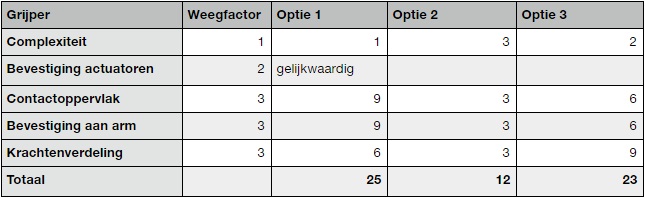
Vanwege de uitkomst van deze beoordeling hebben we besloten om opties 3, 1 en 1 (respectievelijk voor het verticale mechanisme, het horizontale mechanisme en de grijper) op te nemen in ons uiteindelijke ontwerp.