gripposaurus3500π
door WB035
Nadat wij op de hoogte gebracht waren van de eisen die grijper moest hebben om mee te doen aan De Battle, zijn wij gaan werken om deze eisen te converteren in de grijper. Onze brainstormsessies en individuele ontwerpen zijn in ieder geval gebaseerd op de eisen die voor ons al vast stonden.Naast de vaste eisen die gegeven waren voor de werking van de grijper hebben we zelf nog eisen (en wensen) bedacht om de grijper naar onze voorkeur te bouwen en ontwerpen (zie tabel hieroner).
 Onze eisen hebben we gefilterd en vastgesteld na het brainstormen van allemaal eisen die de handigheid van onze grijper verbeteren. Vanuit een lange lijst met eisen hebben wij de fundamentele eisen gekozen die het beste kunnen worden toegepast in een ontwerp. Daarbij hebben wij erop gelet dat deze eisen de grijper niet te ingewikkeld maakt. Wel moesten het eisen zijn die de grijper kon verbeteren in handigheid en die eisen moesten dan wel haalbaar zijn. De wensen daarentegen zijn gebaseerd op onze persoonlijke toevoeging aan de grijper die ervoor zorgen dat deze uniek wordt ten opzichte van de andere grijpers. Daarbij kunt u denken aan de uitstraling van de grijper en de manier/snelheid van de opstelling klaarzetten.
Onze eisen hebben we gefilterd en vastgesteld na het brainstormen van allemaal eisen die de handigheid van onze grijper verbeteren. Vanuit een lange lijst met eisen hebben wij de fundamentele eisen gekozen die het beste kunnen worden toegepast in een ontwerp. Daarbij hebben wij erop gelet dat deze eisen de grijper niet te ingewikkeld maakt. Wel moesten het eisen zijn die de grijper kon verbeteren in handigheid en die eisen moesten dan wel haalbaar zijn. De wensen daarentegen zijn gebaseerd op onze persoonlijke toevoeging aan de grijper die ervoor zorgen dat deze uniek wordt ten opzichte van de andere grijpers. Daarbij kunt u denken aan de uitstraling van de grijper en de manier/snelheid van de opstelling klaarzetten.
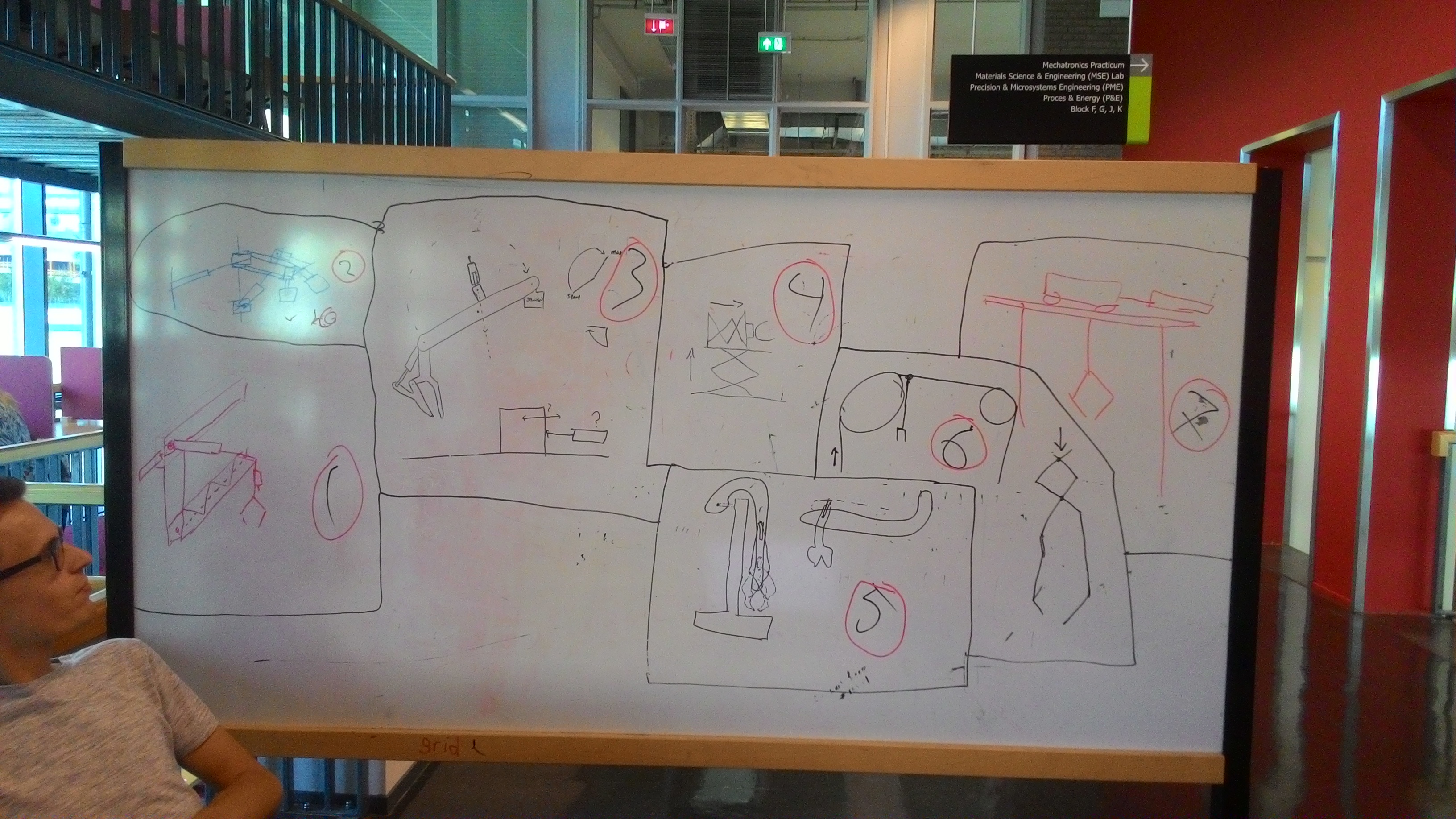
Vele eisen en wensen leiden tot veel ontwerpen, aangezien meerdere groepsleden overlappende ideeën hadden besloten we alle ontwerpen terug te brengen tot de essentie. We doen dit door het complete systeem van de grijper te reduceren tot 5 componenten, deze componenten vormde uiteindelijk de kolommen van onze ontwerp matrix. Hierin werden alle unieke ideeën in samengevat. In eerste instantie kozen we voor een systeem van rails waarmee de grijper verticaal (van bovenaf) op het voorwerp aangrijpt. Helaas bleek bij wat simpele testjes dat het rails systeem niet zou werken door gebrek aan ruimte op het frame als wel de te grote complexiteit van het bevestigen van de grijper aan de rails. Daarop besloten we een stukje terug te gaan. Het ontwerp moest zo simpel mogelijk zijn, de horizontale, verticale en grijperbek bewegingen moeten onafhankelijk van elkaar plaats vinden. Daarom besloten we in de verticale beweging te gaan voor een eenvoudig vierstangenmechanisme, door ons genoemd de ‘parallelogram’, bevestigt op een scharnierende basis om de beweging over de horizontaal te maken. Hierna restte het ons om nog één probleem te tackelen: de grijperbek. Hij moet van bovenaf het object oppakken. De beste manier is om een grijperbek te maken die zich kan vormen naar het object. Wanneer je van boven een zeer smaal taps toelopend flesje pakt moet dat even makkelijk gaan als een groot rechthoekig tetrapak. Een zeer belangrijke eis.
Het whiteboard vol met wilde ideeën na de brainstorm sessie.
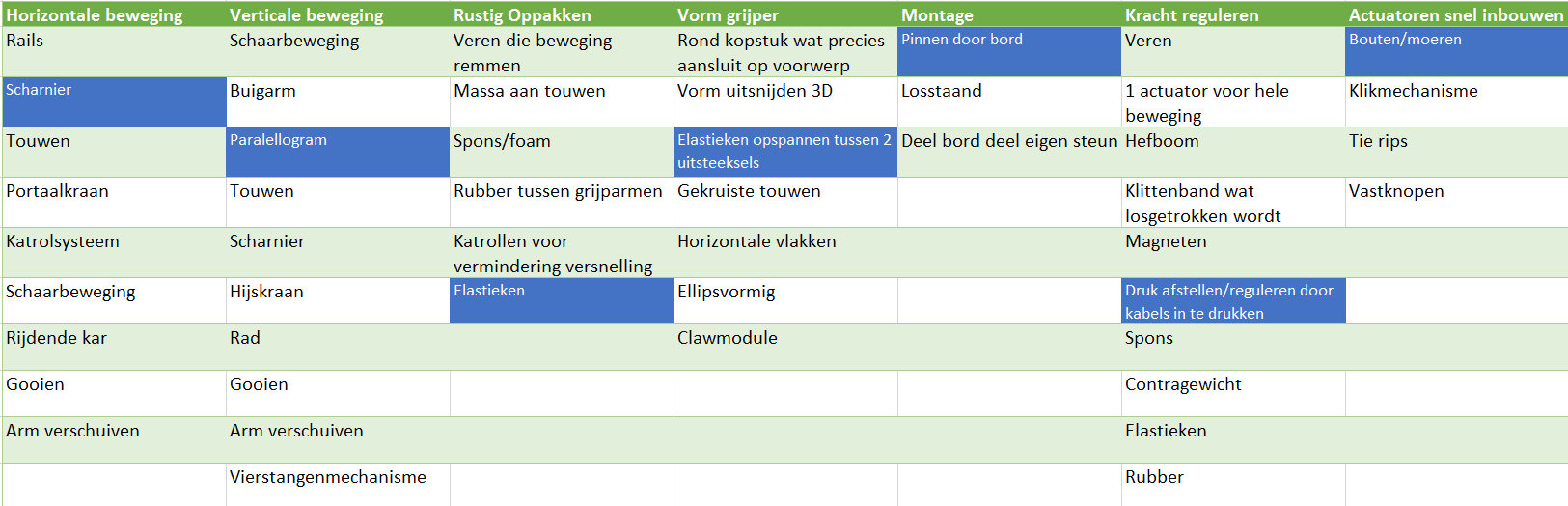
 Morphologisch schema, de blauwe blokken zijn de ideeën die in het eindontwep zijn gebruikt.
Morphologisch schema, de blauwe blokken zijn de ideeën die in het eindontwep zijn gebruikt.
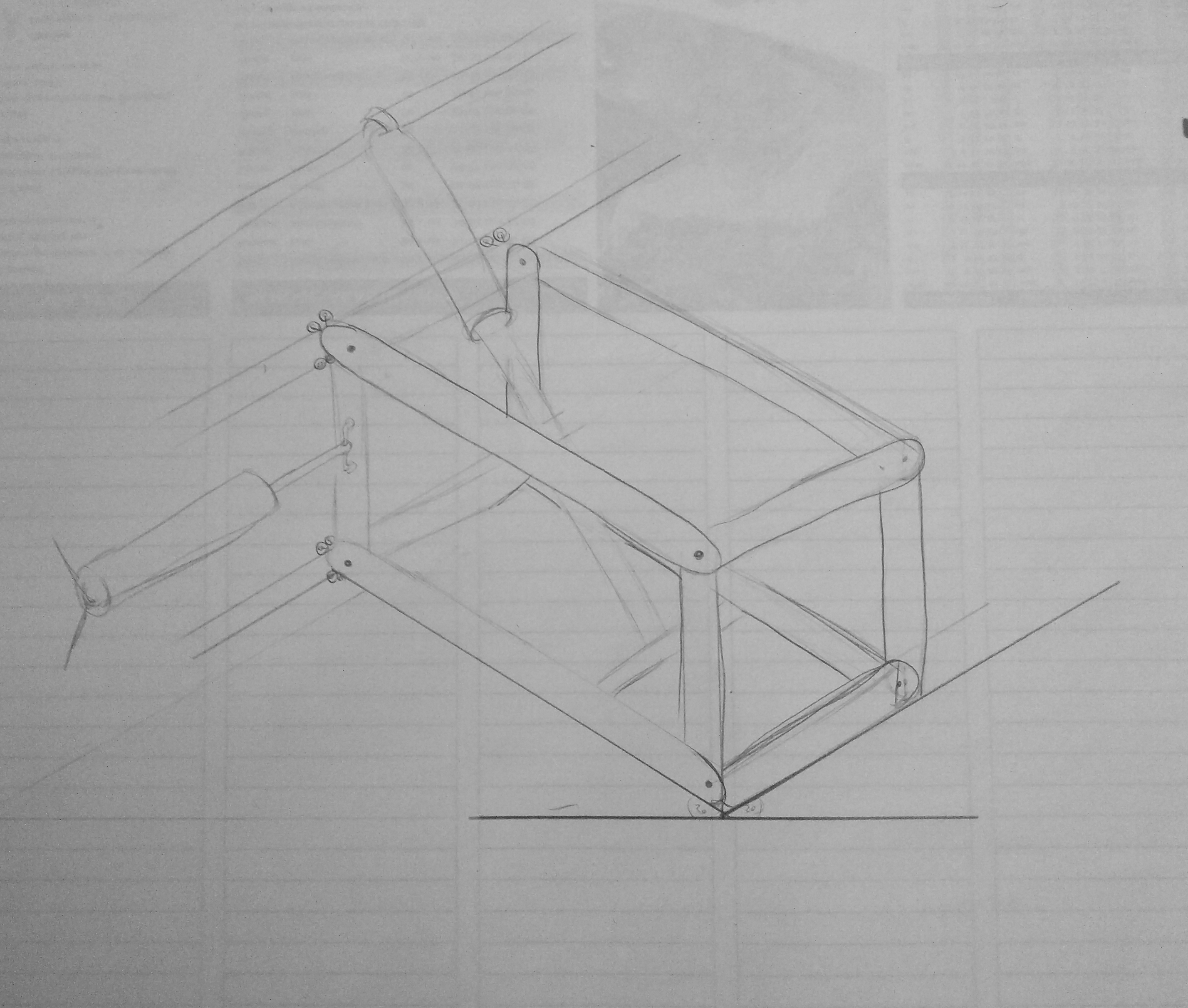
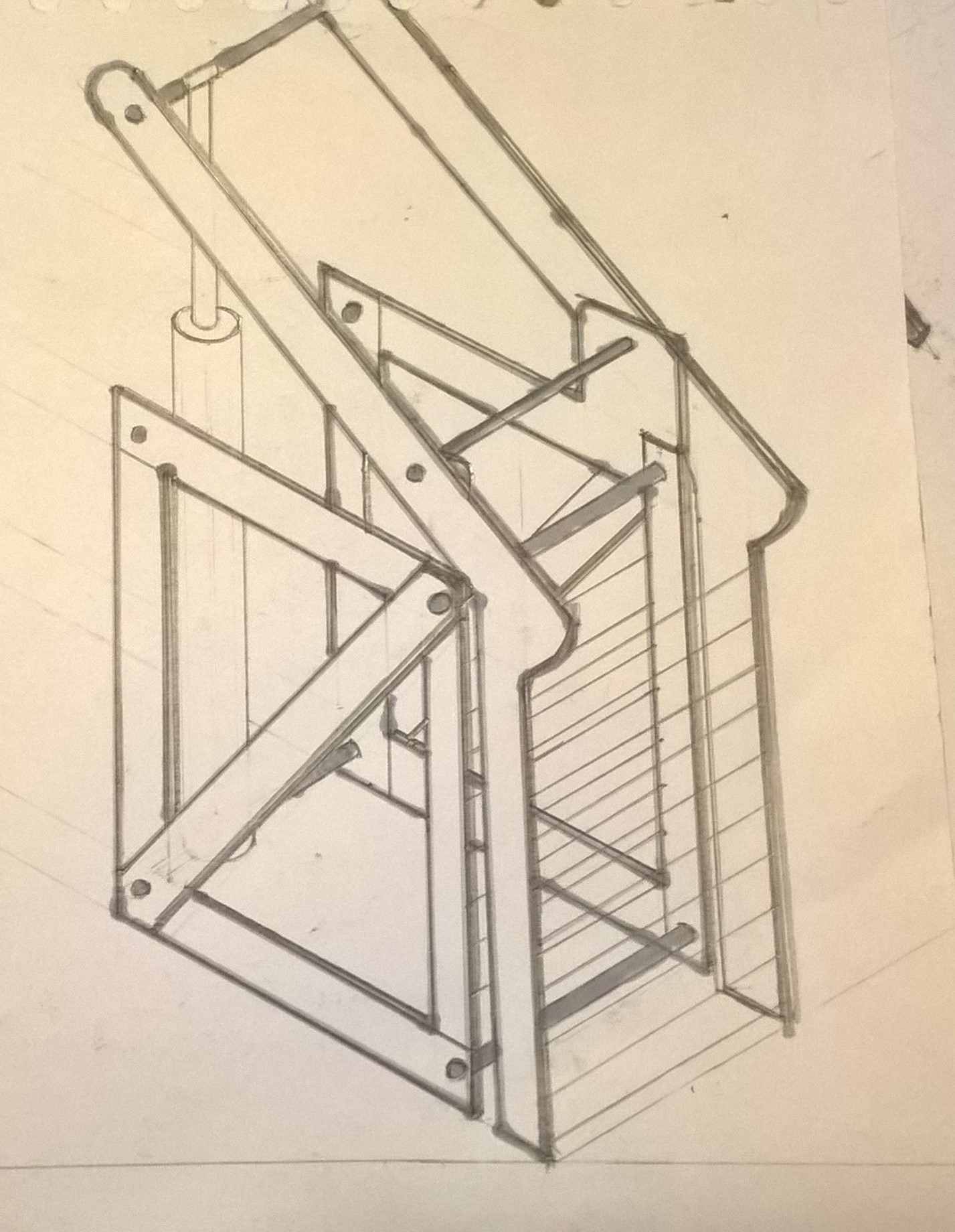
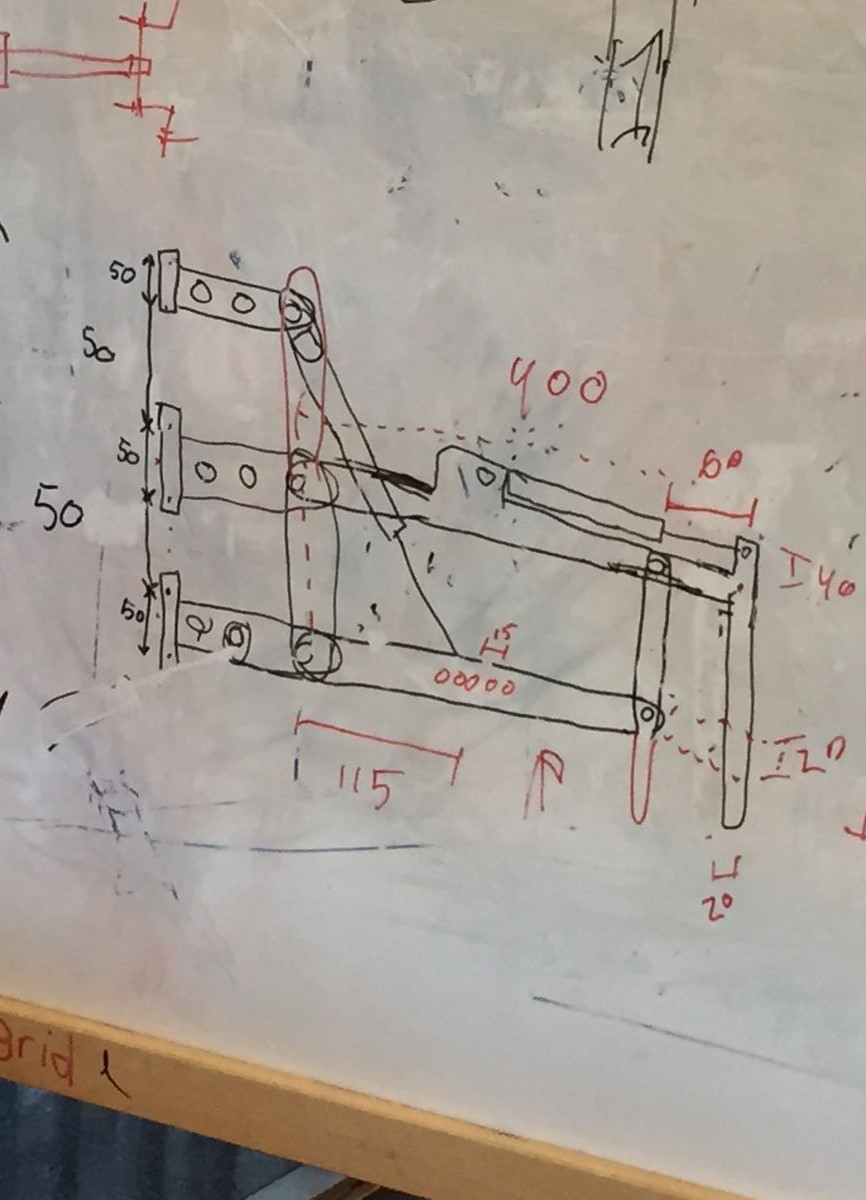
 Schets voor een grijperarm op een scharnierende basis. De grijperarm werkt in de verticale richting en de basis scharniert in de horizontale richting.
Schets voor een grijperarm op een scharnierende basis. De grijperarm werkt in de verticale richting en de basis scharniert in de horizontale richting.
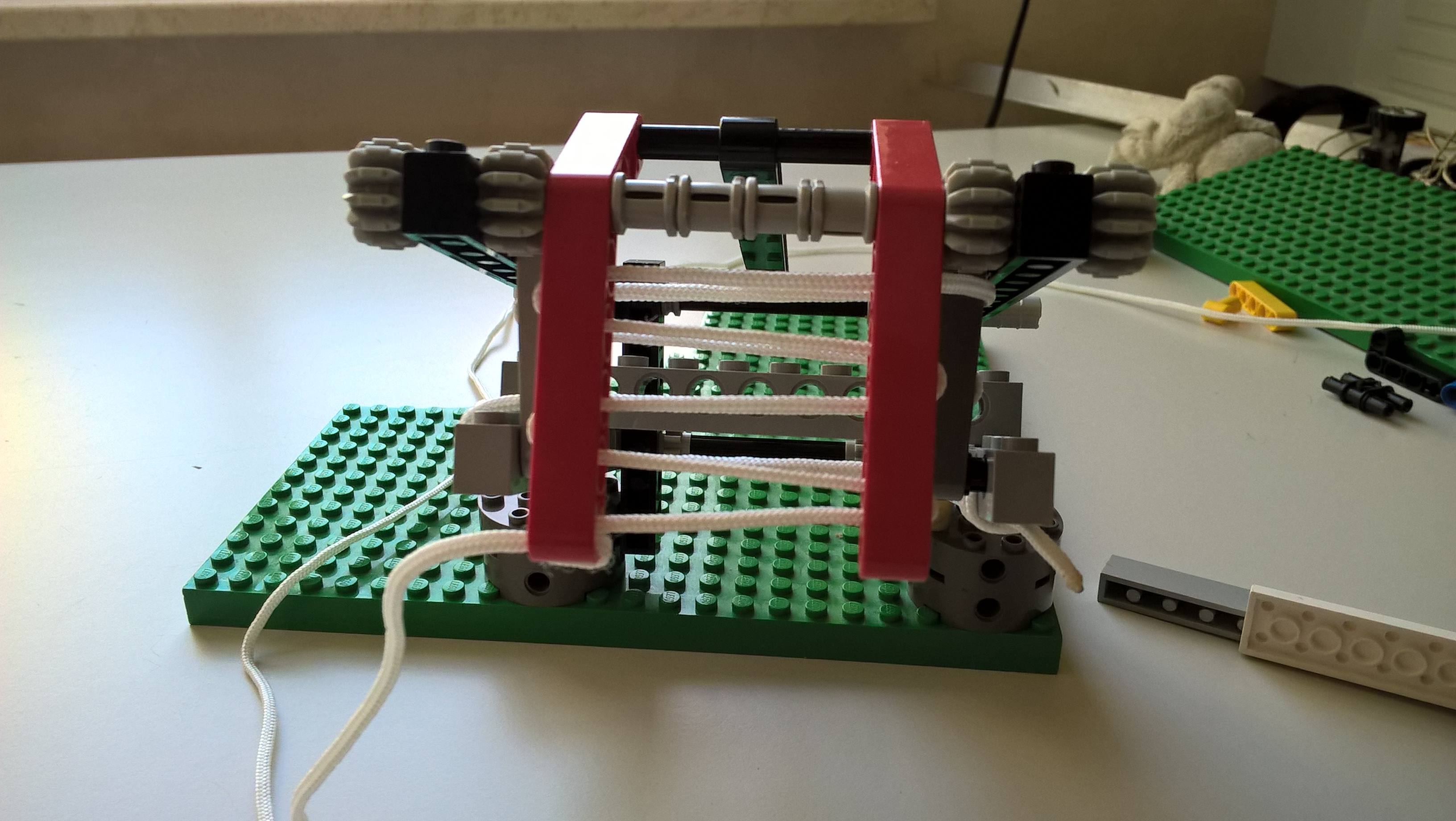
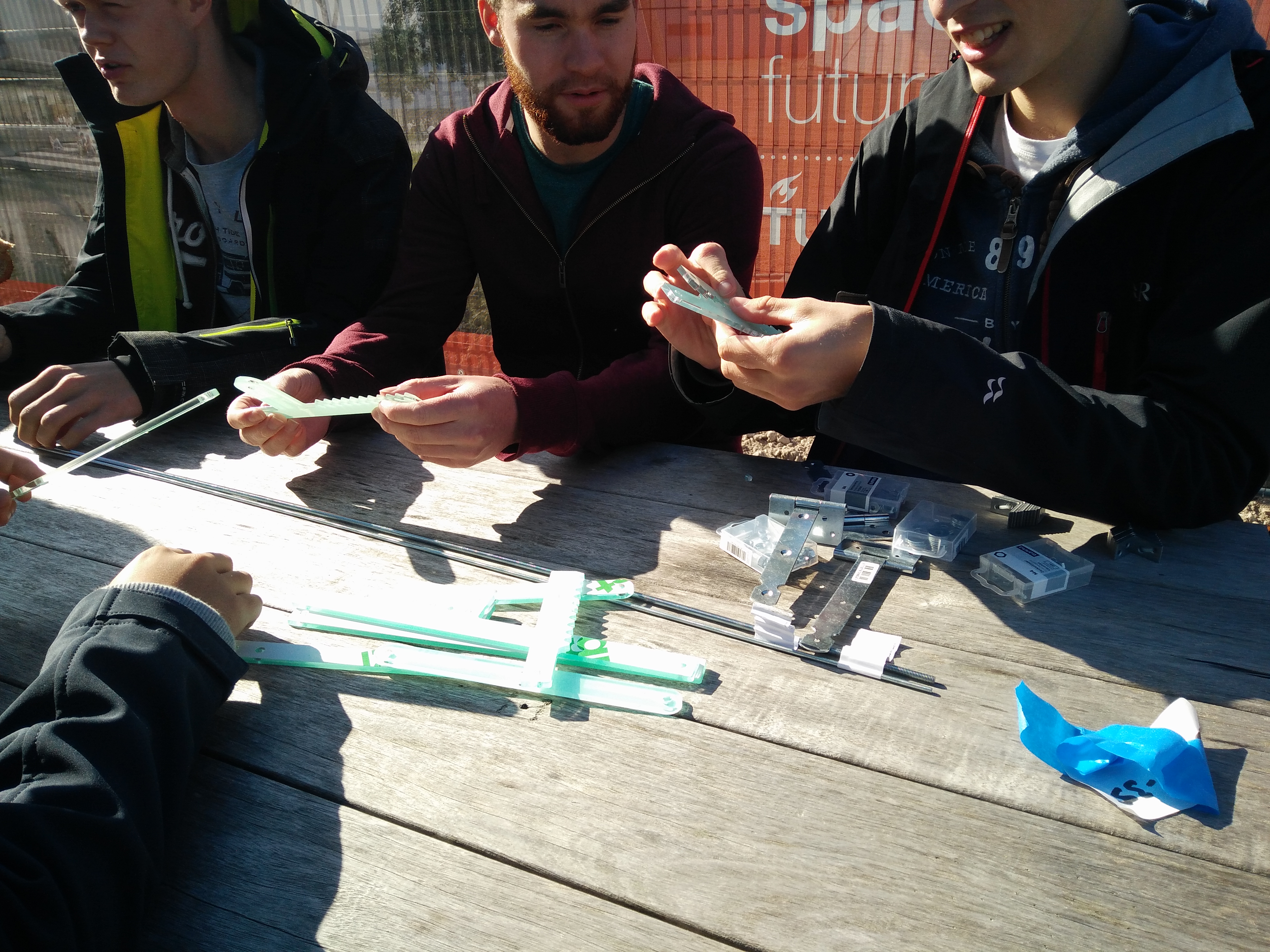
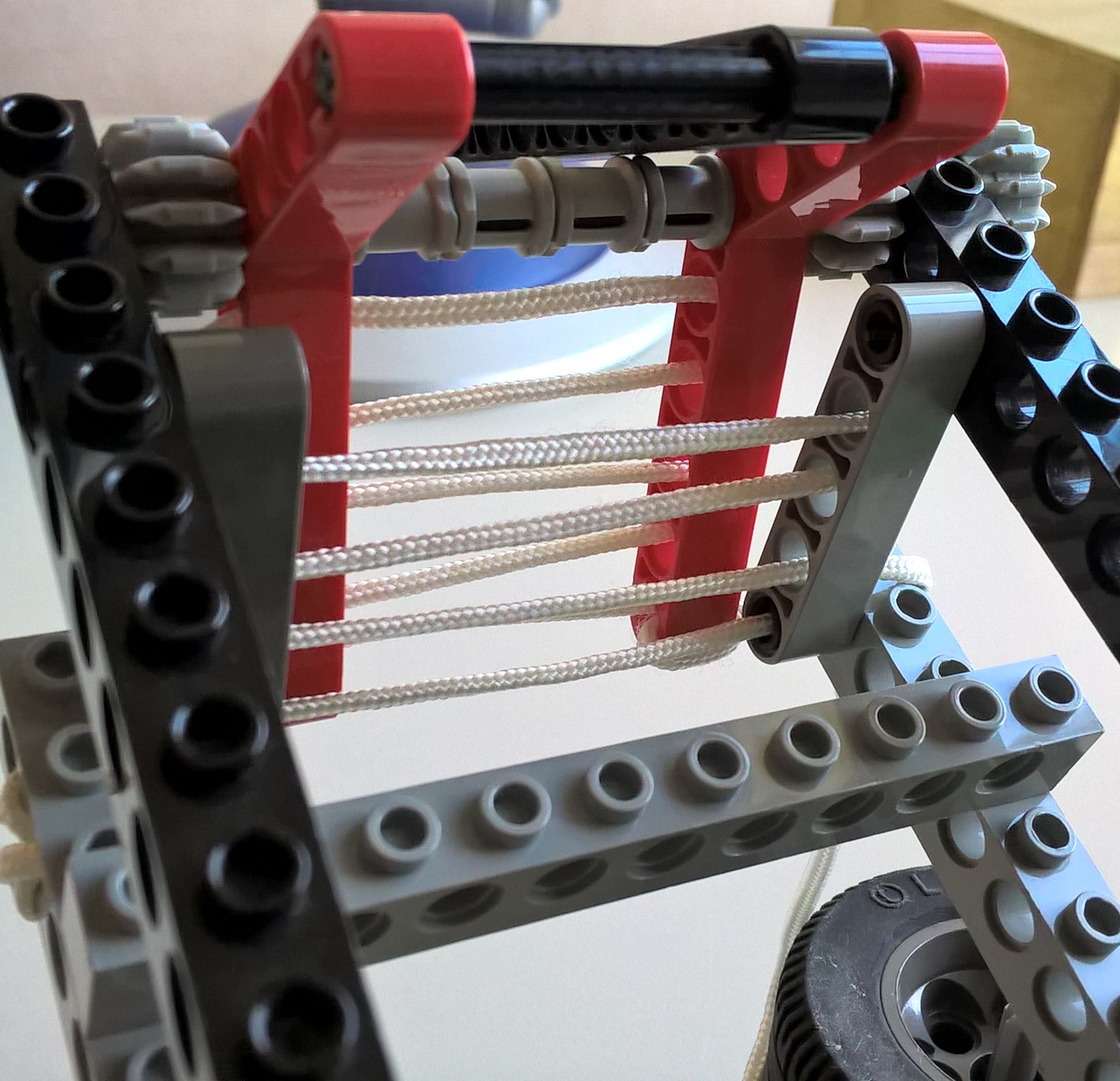
Voordat we een eindontwerp hebben gekozen, moest er eerst proefmodellen worden gemaakt om een idee te krijgen of de ontwerpen in de praktijk goed uitpakken. Het eerste proefmodel werd gebouwd met Lego™-blokjes waarbij we vooral focuste op de grijper gedeelte. Het doel was om te kijken of er complicaties zullen ontstaan tijdens de beweging van de grijper.
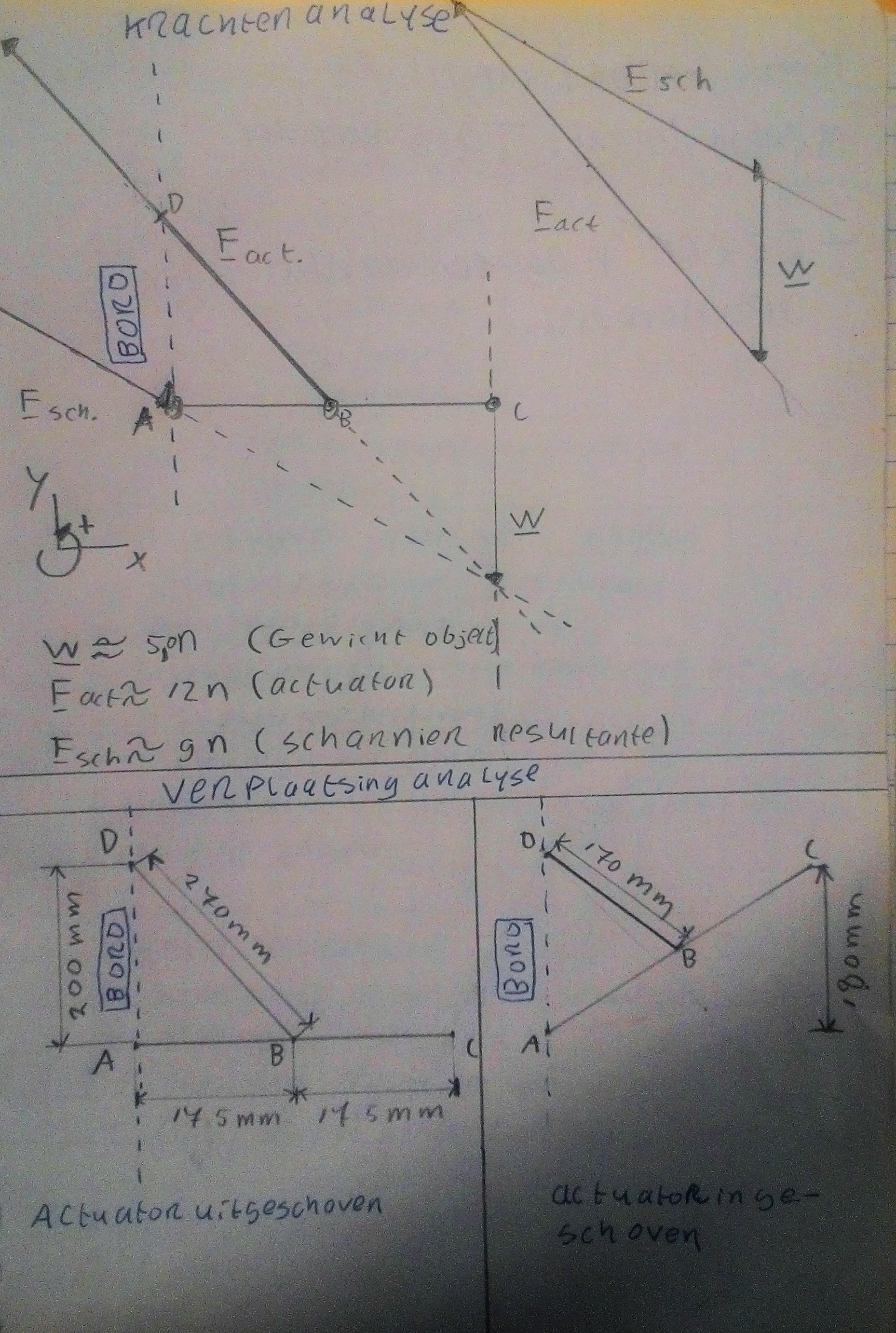
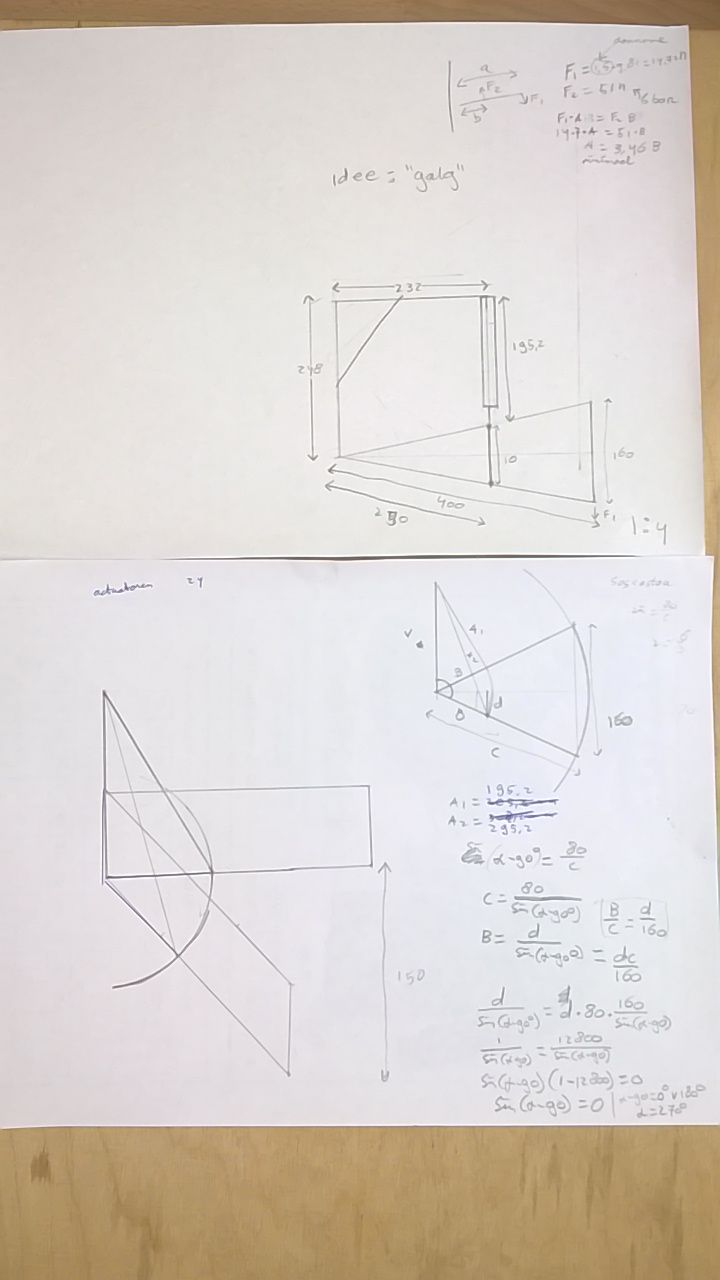
 Als tweede hebben we met karton een 2D-model gemaakt van ons voorlopig definitieve eindontwerp. Hierbij zochten we uit of de arm van de grijper de beweging kon halen met een nagemaakte actuator. Hierbij werd duidelijk dat een armlengte van 400mm een beetje aan de lange kant zat. Het kartonnen model was afgeleid van de berekeningen en tekeningen die we van tevoren hebben gemaakt. De bedoeling was dat de actuator bij het intrekken een verticale afstand van 160mm kon maken waarbij de hoek in de beginstand hetzelfde was als de eindstand. Dit was toen het moment waarop we wisten dat het eindontwerp volledig was.
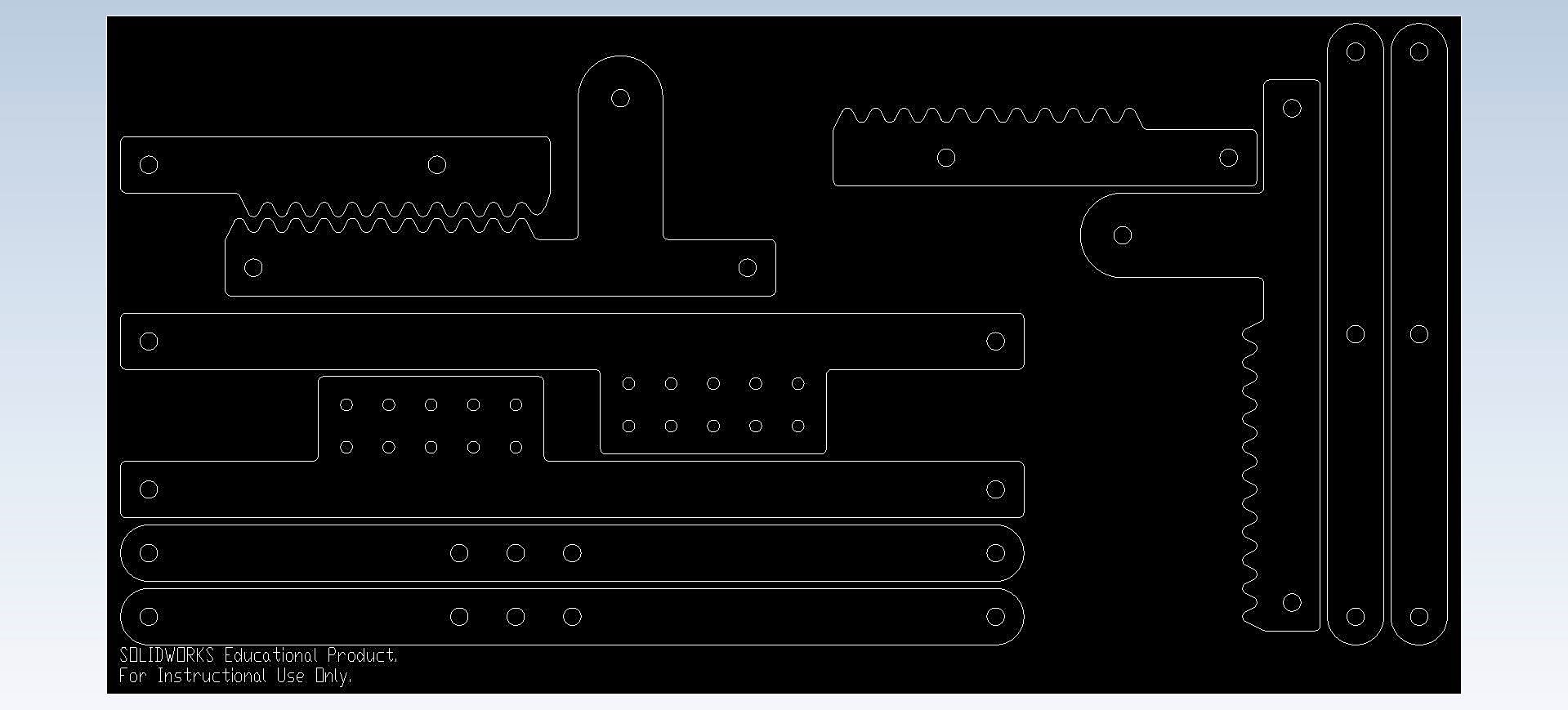
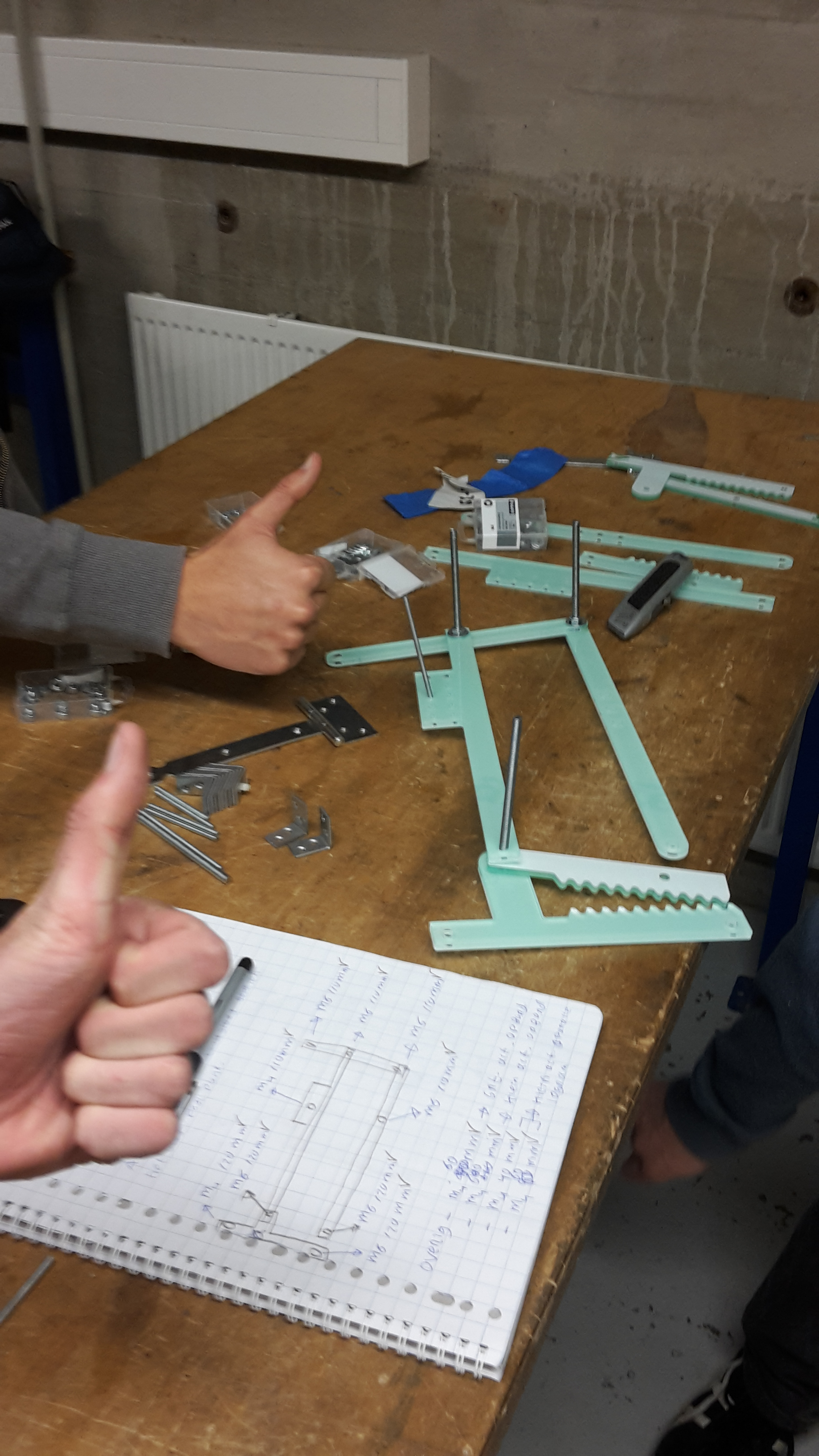
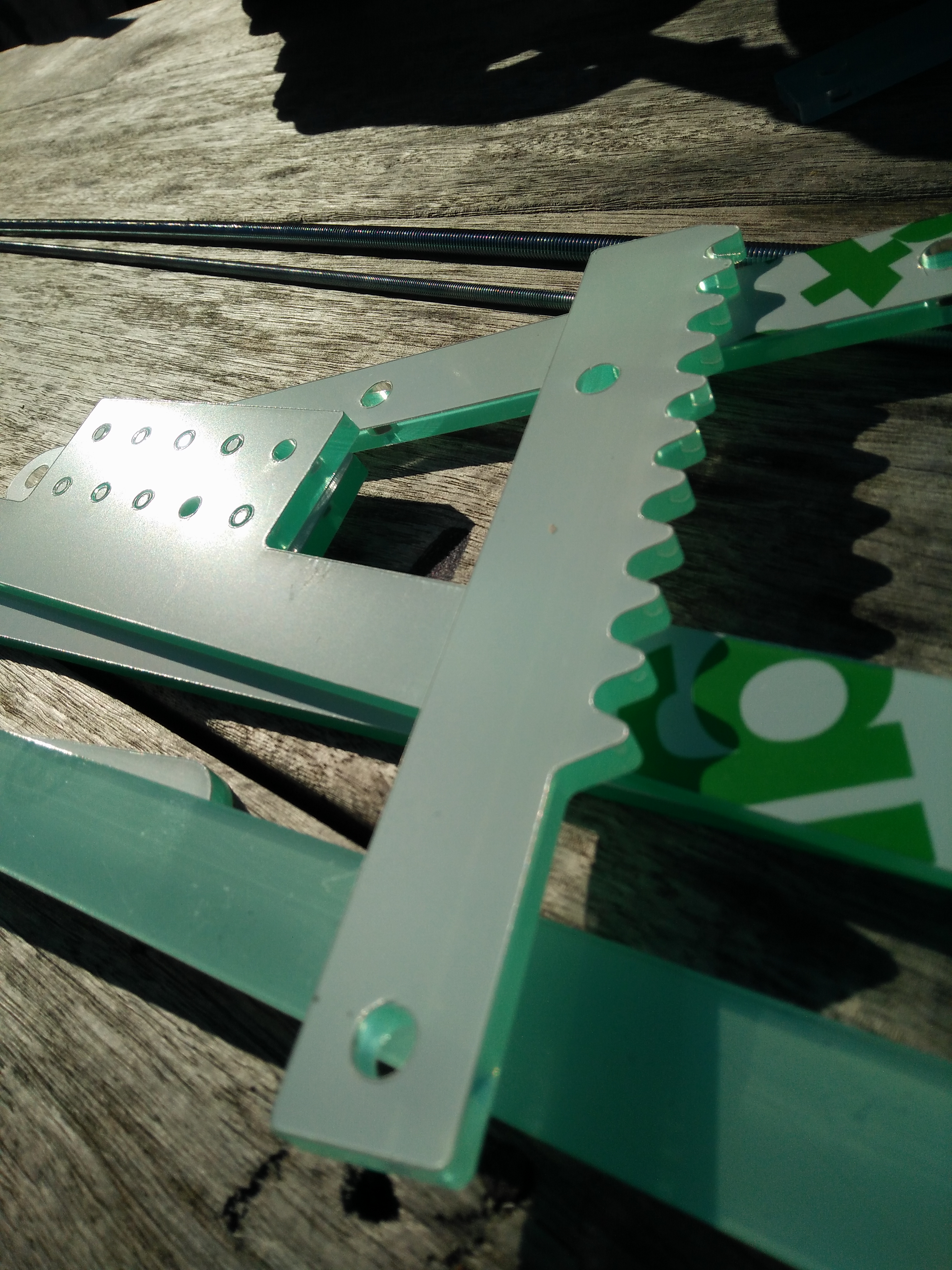
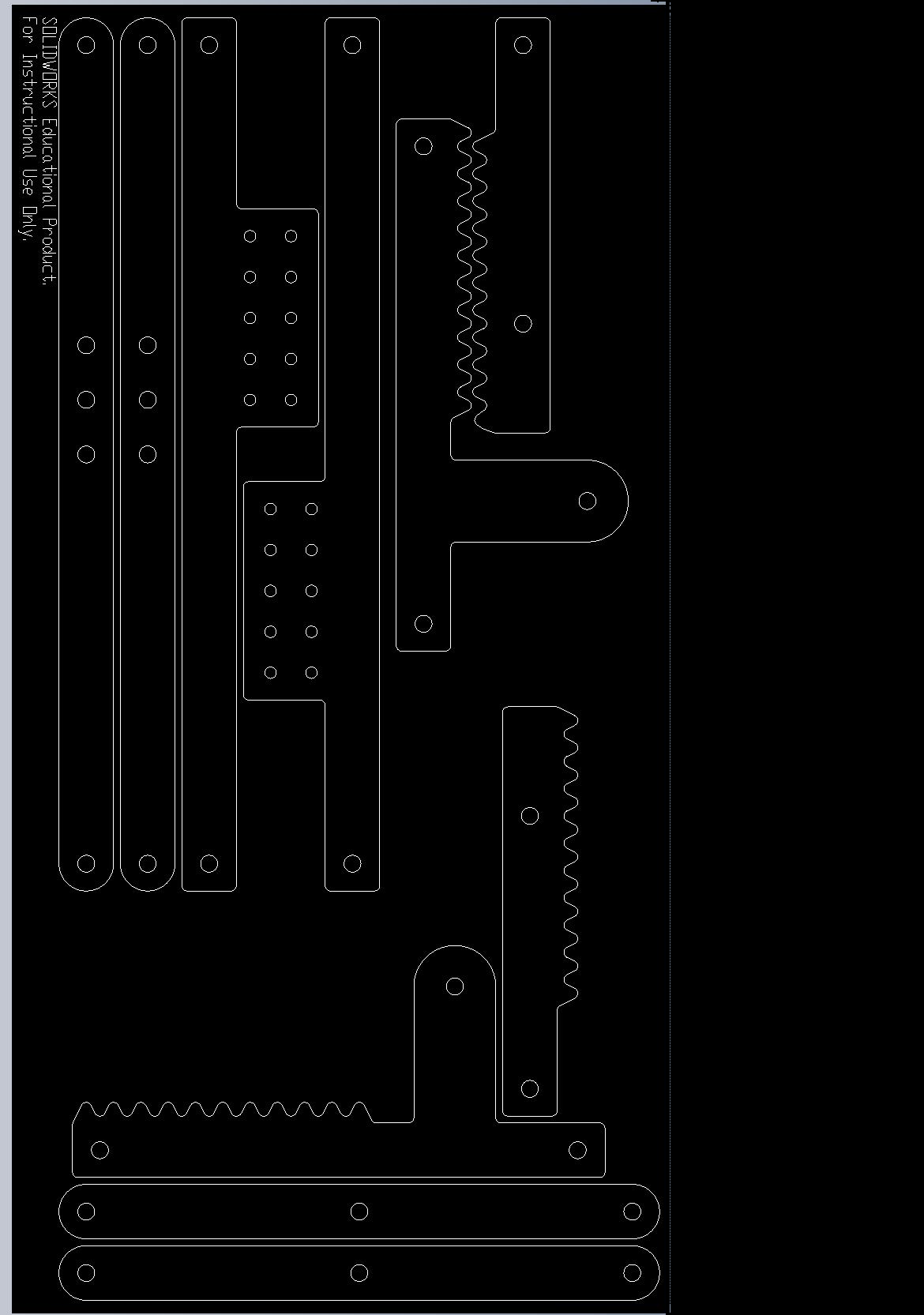
Op de Technische Universiteit Delft hebben ze een groot aanbod aan materialen die we kunnen gebruiken. Echter kregen we alleen een stuk Perspex, poly(methyl methacrylate), aangeboden van 240x490x20 mm waaruit alle onderdelen van de grijper uitgesneden konden worden met lasersnijden. Perspex is licht, versplintert niet en is makkelijk in verschillende vormen te produceren, ideaal dus om een grijper mee te maken. Met behulp van SolidWorks™ hebben we de onderdelen getekend die uitgesneden moesten worden. Verder zijn de kleine dingen zoals ringen en moeren zelf ingekocht bij de lokale Gamma™.
We hebben uiteindelijk na 4 weken een goed definitief ontwerp gemaakt van de grijper. Hier voorafgaand hebben we berekeningen gemaakt en veel informatie opgezocht waarom dit ons eindontwerp zal zijn.
Het eerste idee voor de horizontale beweging was het gebruik van rails. Een rails die aan het bord wordt vastgemaakt zou de hele grijper opzij duwen met behulp van een actuator.
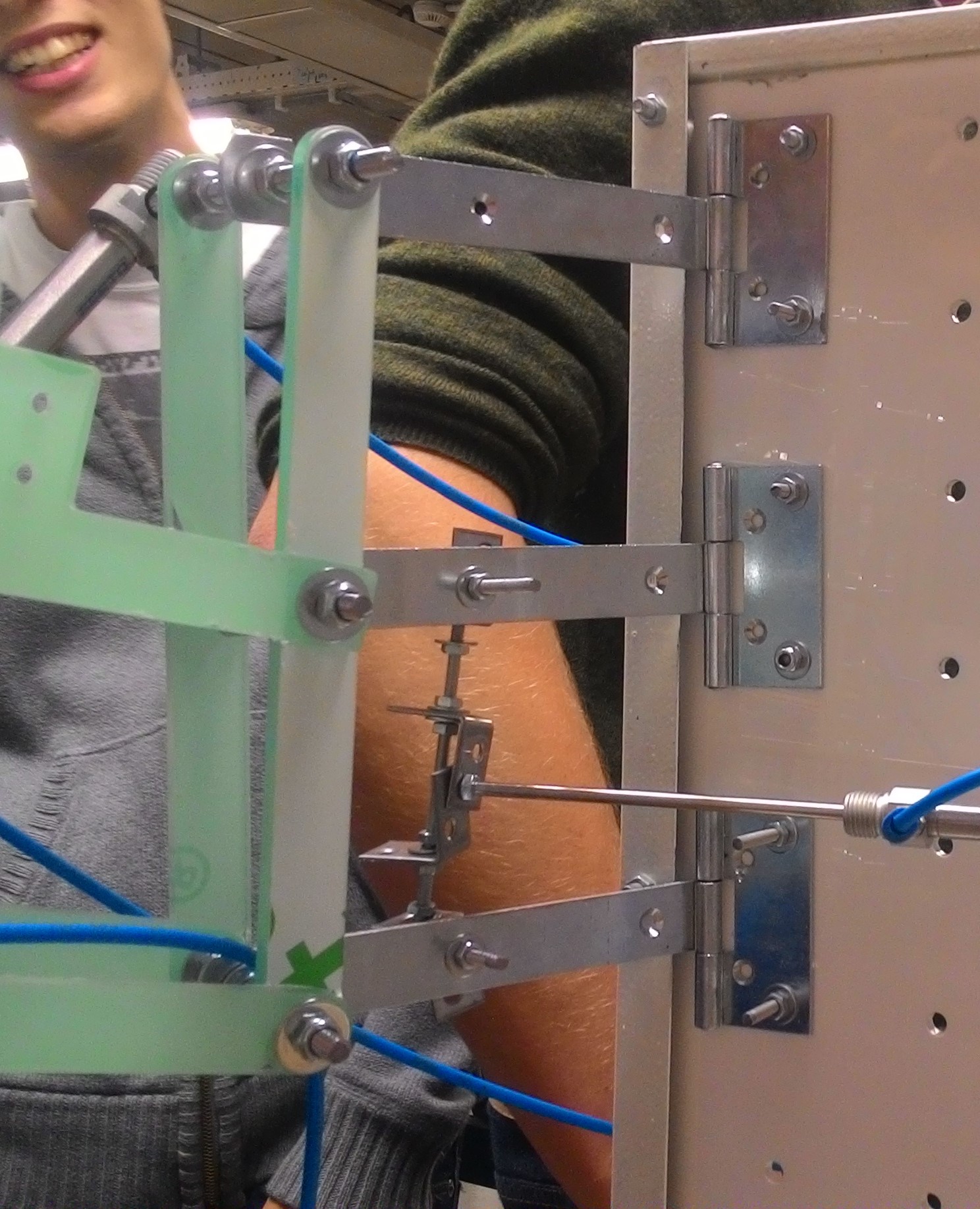
Echter kwamen we op verscheidene problemen tegen: de rails zouden teveel wrijving opleveren, het zou niet op het bord passen, de prijs van zo’n rail is te hoog en het verbinden van de rails met de grijper zou veel te ingewikkeld worden. De rails werden verworpen en de tweede beste idee werd gebruikt: kruisscharnieren. Hierdoor is elk probleem die werd genoemd meteen opgelost.
Ook zaten er in het originele idee minder gaten in de bovenste deel van de arm. Met berekeningen werd een conclusie genomen dat er niet teveel gaatjes hoeven te komen, maar omdat er altijd een foutmarge is bij de overgang tussen theorie en praktijk (met name de uitgesneden stukken voor de grijper) en er nog onzekerheid was over of de actuator wel sterk genoeg was om het gewicht van de hele grijper te tillen, zijn er extra gaten gemaakt zodat de actuator meerdere posities kon nemen voor het geval de actuator de grijper niet kon tillen.
Voor de verticale beweging was er snel een beslissing genomen. De parallelogram ( = vierstangenmechanisme) is een handig en betrouwbare manier om de grijper omhoog te laten komen.
Als tweede hebben we met karton een 2D-model gemaakt van ons voorlopig definitieve eindontwerp. Hierbij zochten we uit of de arm van de grijper de beweging kon halen met een nagemaakte actuator. Hierbij werd duidelijk dat een armlengte van 400mm een beetje aan de lange kant zat. Het kartonnen model was afgeleid van de berekeningen en tekeningen die we van tevoren hebben gemaakt. De bedoeling was dat de actuator bij het intrekken een verticale afstand van 160mm kon maken waarbij de hoek in de beginstand hetzelfde was als de eindstand. Dit was toen het moment waarop we wisten dat het eindontwerp volledig was.
Op de Technische Universiteit Delft hebben ze een groot aanbod aan materialen die we kunnen gebruiken. Echter kregen we alleen een stuk Perspex, poly(methyl methacrylate), aangeboden van 240x490x20 mm waaruit alle onderdelen van de grijper uitgesneden konden worden met lasersnijden. Perspex is licht, versplintert niet en is makkelijk in verschillende vormen te produceren, ideaal dus om een grijper mee te maken. Met behulp van SolidWorks™ hebben we de onderdelen getekend die uitgesneden moesten worden. Verder zijn de kleine dingen zoals ringen en moeren zelf ingekocht bij de lokale Gamma™.
We hebben uiteindelijk na 4 weken een goed definitief ontwerp gemaakt van de grijper. Hier voorafgaand hebben we berekeningen gemaakt en veel informatie opgezocht waarom dit ons eindontwerp zal zijn.
Het eerste idee voor de horizontale beweging was het gebruik van rails. Een rails die aan het bord wordt vastgemaakt zou de hele grijper opzij duwen met behulp van een actuator.
Echter kwamen we op verscheidene problemen tegen: de rails zouden teveel wrijving opleveren, het zou niet op het bord passen, de prijs van zo’n rail is te hoog en het verbinden van de rails met de grijper zou veel te ingewikkeld worden. De rails werden verworpen en de tweede beste idee werd gebruikt: kruisscharnieren. Hierdoor is elk probleem die werd genoemd meteen opgelost.
Ook zaten er in het originele idee minder gaten in de bovenste deel van de arm. Met berekeningen werd een conclusie genomen dat er niet teveel gaatjes hoeven te komen, maar omdat er altijd een foutmarge is bij de overgang tussen theorie en praktijk (met name de uitgesneden stukken voor de grijper) en er nog onzekerheid was over of de actuator wel sterk genoeg was om het gewicht van de hele grijper te tillen, zijn er extra gaten gemaakt zodat de actuator meerdere posities kon nemen voor het geval de actuator de grijper niet kon tillen.
Voor de verticale beweging was er snel een beslissing genomen. De parallelogram ( = vierstangenmechanisme) is een handig en betrouwbare manier om de grijper omhoog te laten komen.
Materiaallijst:
Perspex 240x490x20mm
1x 4x1000mm draadeind
1x 6x1000mm draadeind
3x kruishengen 150mm
2x stoelhoeken 25mm
30x M6 carrossring
16x M4 carrosring
30x M6 zeskantmoer
16x M4 zeskantmoer
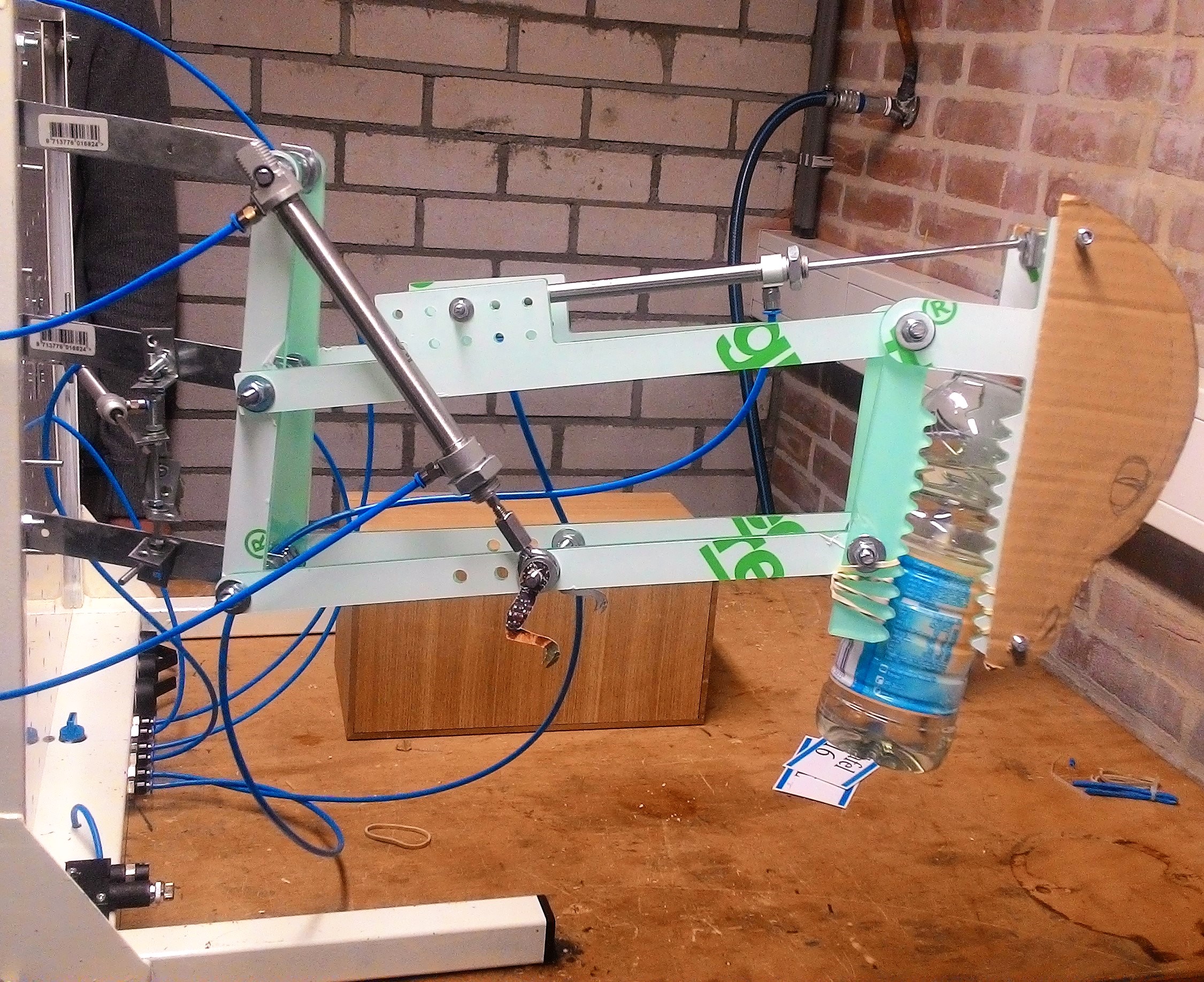
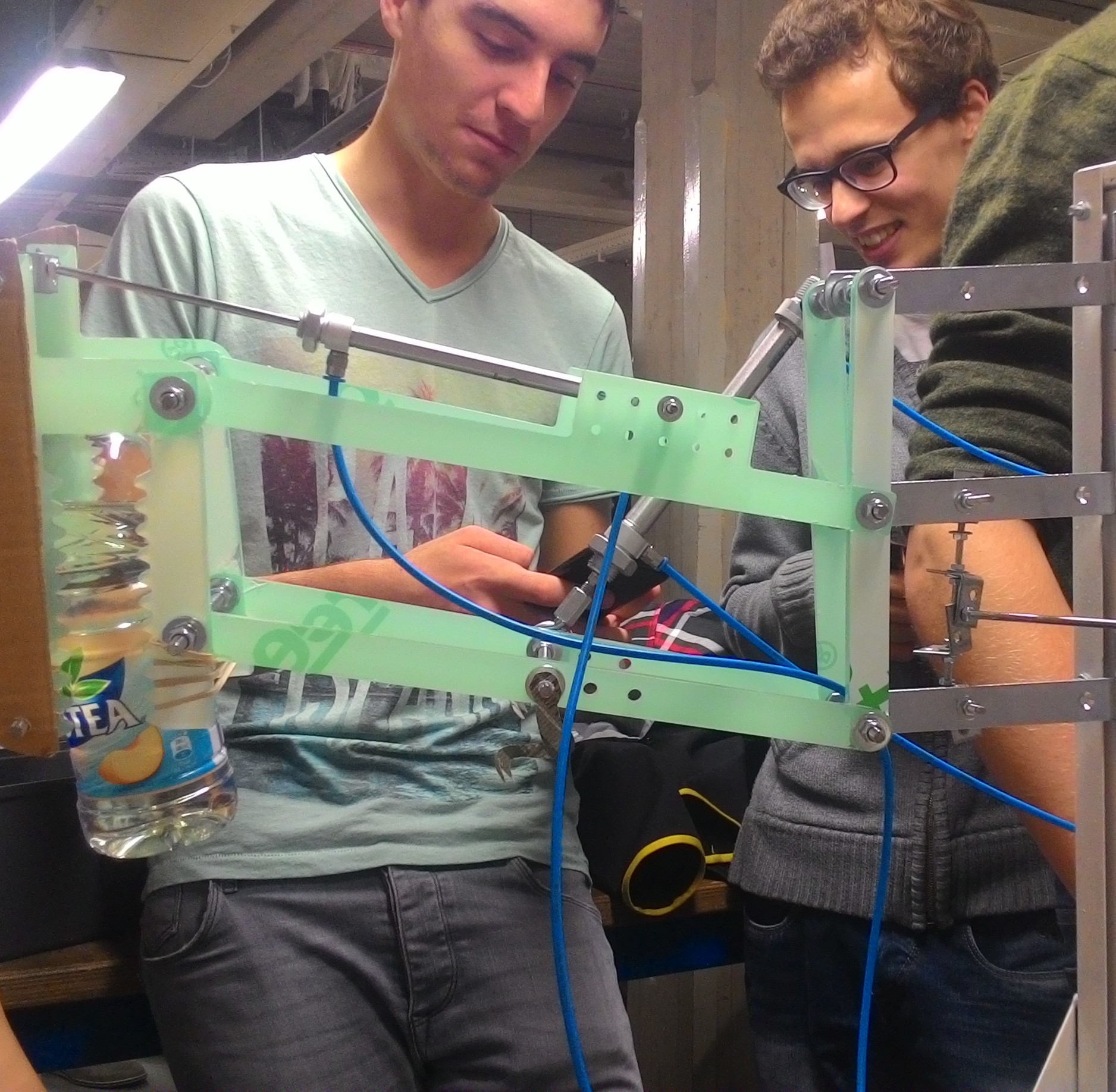
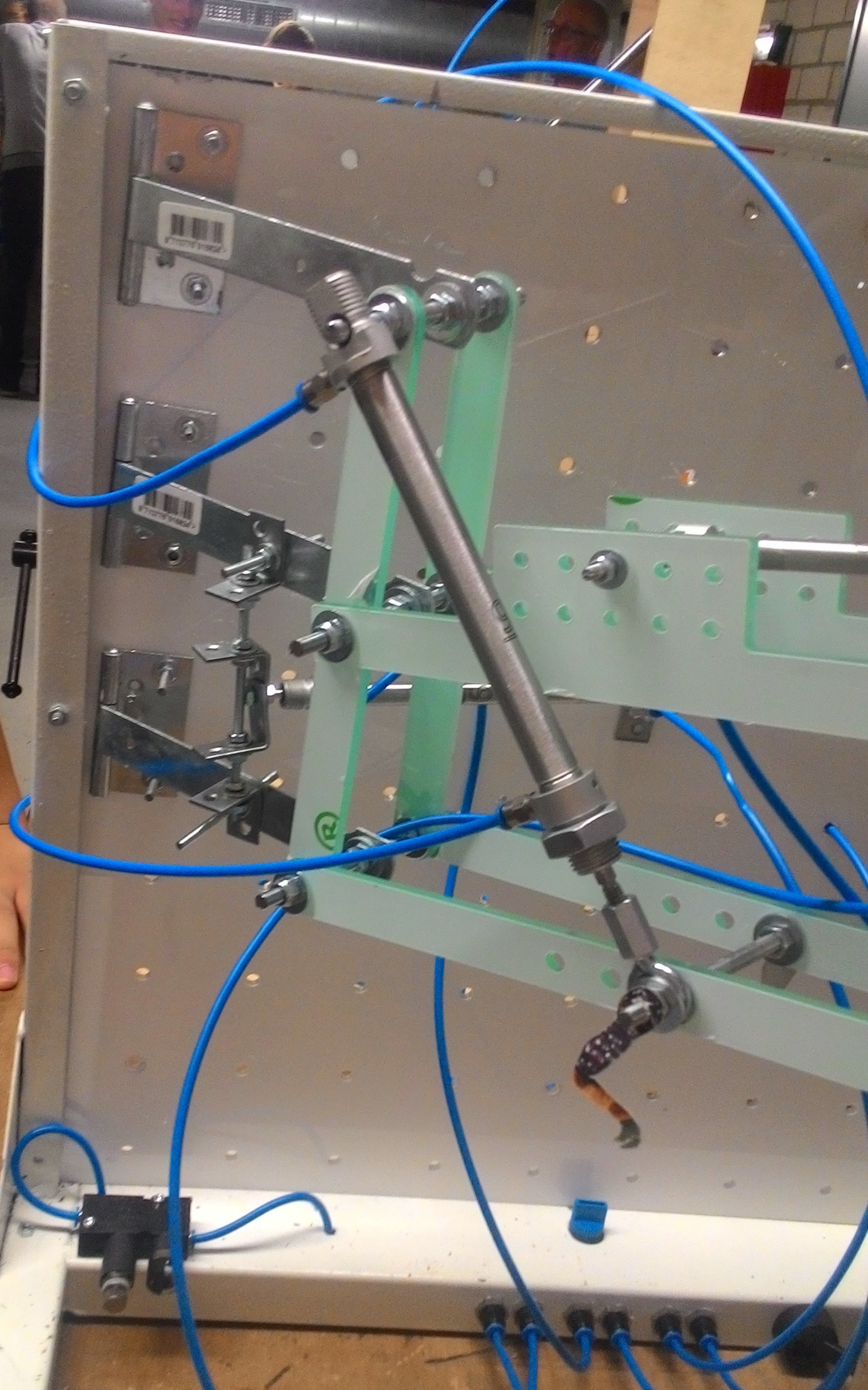
Een grijper op papier bedenken en in theorie hiermee rekenen is natuurlijk heel anders dan hem uiteindelijk in praktijk te bouwen en testen. Hier kwamen wij ook achter toen wij ons definitief ontwerp in de AWS in elkaar gingen zetten. Het monteren van de onderdelen ging voorspoedig en de gemonteerde grijper ziet eruit zoals we verwachten. Wegens tijdgebrek lukte het ons die dag alleen nog de kleine actuator, die voor de grijpbeweging verantwoordelijk is, in te bouwen. Door een beetje met de hand te testen, zagen we al dat het claw mechanisme werkte zoals wij ons dat hadden voorgesteld.
 De volgende keer in de AWS konden we aan de montage aan het bord beginnen, hiervoor moesten we nog grotere gaten in de scharnieren maken. Aan deze gaten kwam onze grijper te hangen. We monteerde de actuator voor het sluiten van de bek en de verticale beweging. De laatste hebben we vastgezet aan de zijkant van het parallellogram, de rede: de actuator zit hierdoor niet in de weg van de grijper-actuator en hij kan makkelijk in en uit de grijper gehaald worden. De actuator voor de horizontale beweging was helaas stuk. Dus deze hebben we niet getest.
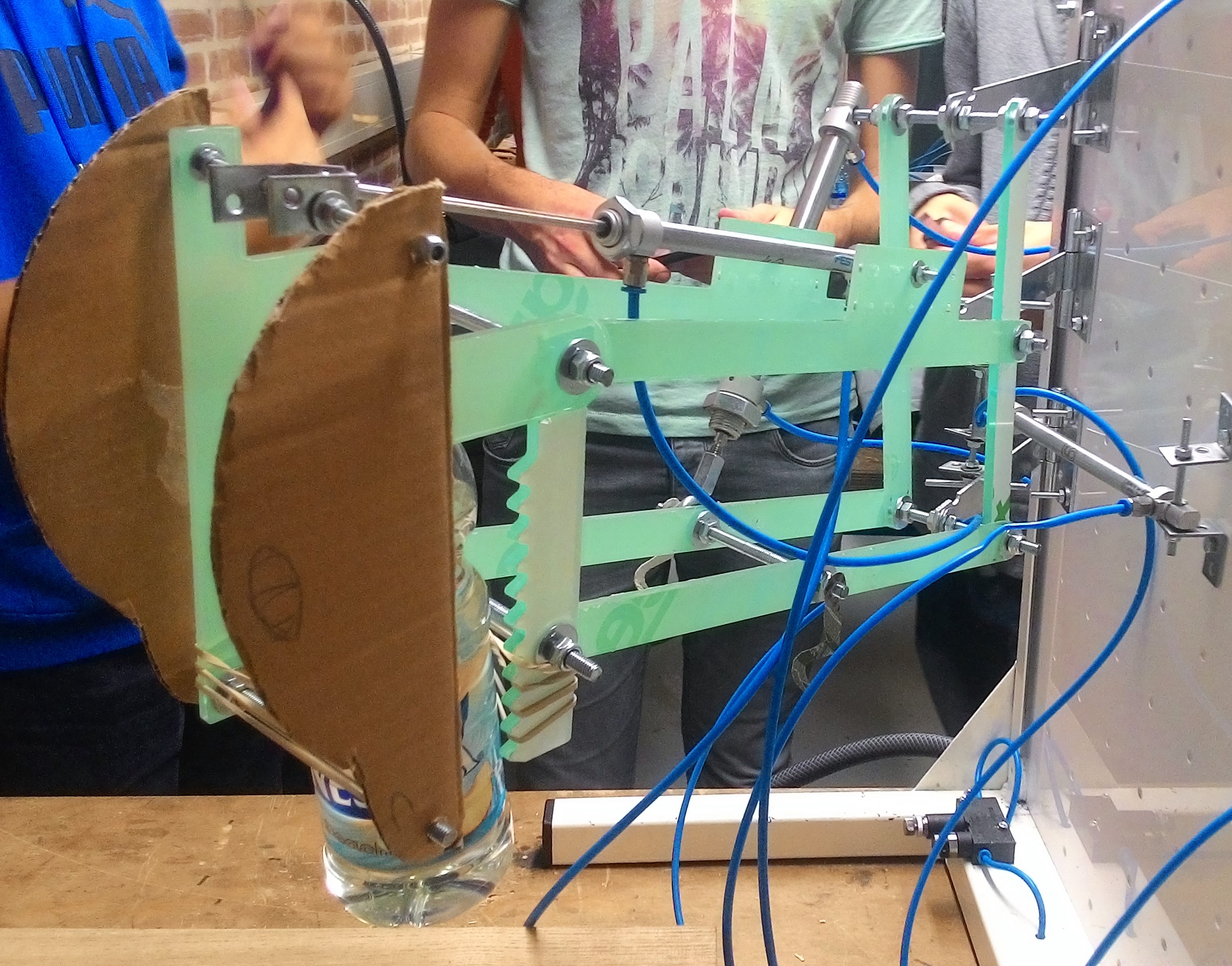
Hierna probeerde we de complete grijperbek van elastieken te voorzien, maar het perspex verboog al bij een paar elastieken, dus spanden wij er nu maar ongeveer vier per kant. Dit verhielp het verbuigen.
De verminderde hoeveelheid elastieken bleek geen problemen te geven bij het oppakken van objecten. Verder waren er helaas twee problemen: tijdens de tests bleek dat de moeren zichzelf los draaiden. Daarnaast versnelde de grijper te snel waardoor de grijper met een hoge snelheid, en dus grote schokken, in zijn eindpositie tot stilstand komt. Hier leedt de constructie onder en zorgde voor het omvallen en beschadigen van de opgepakt objecten. We moesten een oplossing verzinnen voor deze twee problemen.
De volgende keer in de AWS konden we aan de montage aan het bord beginnen, hiervoor moesten we nog grotere gaten in de scharnieren maken. Aan deze gaten kwam onze grijper te hangen. We monteerde de actuator voor het sluiten van de bek en de verticale beweging. De laatste hebben we vastgezet aan de zijkant van het parallellogram, de rede: de actuator zit hierdoor niet in de weg van de grijper-actuator en hij kan makkelijk in en uit de grijper gehaald worden. De actuator voor de horizontale beweging was helaas stuk. Dus deze hebben we niet getest.
Hierna probeerde we de complete grijperbek van elastieken te voorzien, maar het perspex verboog al bij een paar elastieken, dus spanden wij er nu maar ongeveer vier per kant. Dit verhielp het verbuigen.
De verminderde hoeveelheid elastieken bleek geen problemen te geven bij het oppakken van objecten. Verder waren er helaas twee problemen: tijdens de tests bleek dat de moeren zichzelf los draaiden. Daarnaast versnelde de grijper te snel waardoor de grijper met een hoge snelheid, en dus grote schokken, in zijn eindpositie tot stilstand komt. Hier leedt de constructie onder en zorgde voor het omvallen en beschadigen van de opgepakt objecten. We moesten een oplossing verzinnen voor deze twee problemen.
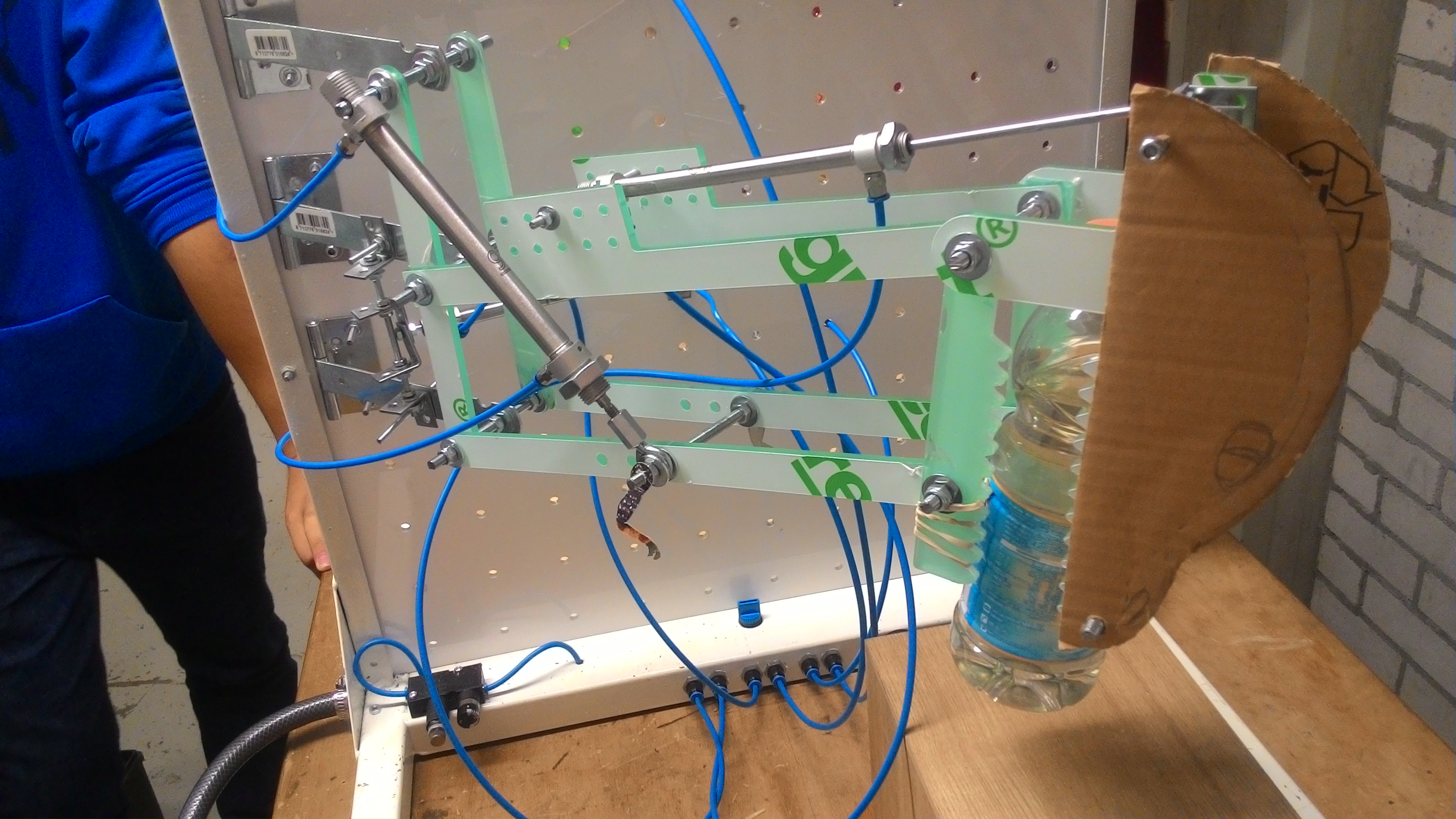 Op de derde dag in de AWS hebben wij onze twee problemen opgelost. De losdraaiende moeren hebben we vervangen door zelfborgende moeren. Het probleem van de te heftige bewegingen hebben we opgelost door de persluchtslangen dicht te knijpen met een combinatietang. Dit verlaagt de flow van de lucht die in de actuator gaat, hierdoor wordt de druk in de actuator langzaam opgebouwd wat een rustige beweging bevordert. We konden zelfs een beker gevuld met water oppakken en op het plateau zetten. De bek van de grijper bleek tijdens het testen niet alleen bekers, flesjes en tetrapakken vast te houden, maar ook veel andere verschillende voorwerpen, dit is ook in het filmpje te zien. Daarnaast was er nu ook een actuator voor de horizontale bewegingen beschikbaar. De beweging ging ook soepel.
Op de derde dag in de AWS hebben wij onze twee problemen opgelost. De losdraaiende moeren hebben we vervangen door zelfborgende moeren. Het probleem van de te heftige bewegingen hebben we opgelost door de persluchtslangen dicht te knijpen met een combinatietang. Dit verlaagt de flow van de lucht die in de actuator gaat, hierdoor wordt de druk in de actuator langzaam opgebouwd wat een rustige beweging bevordert. We konden zelfs een beker gevuld met water oppakken en op het plateau zetten. De bek van de grijper bleek tijdens het testen niet alleen bekers, flesjes en tetrapakken vast te houden, maar ook veel andere verschillende voorwerpen, dit is ook in het filmpje te zien. Daarnaast was er nu ook een actuator voor de horizontale bewegingen beschikbaar. De beweging ging ook soepel.
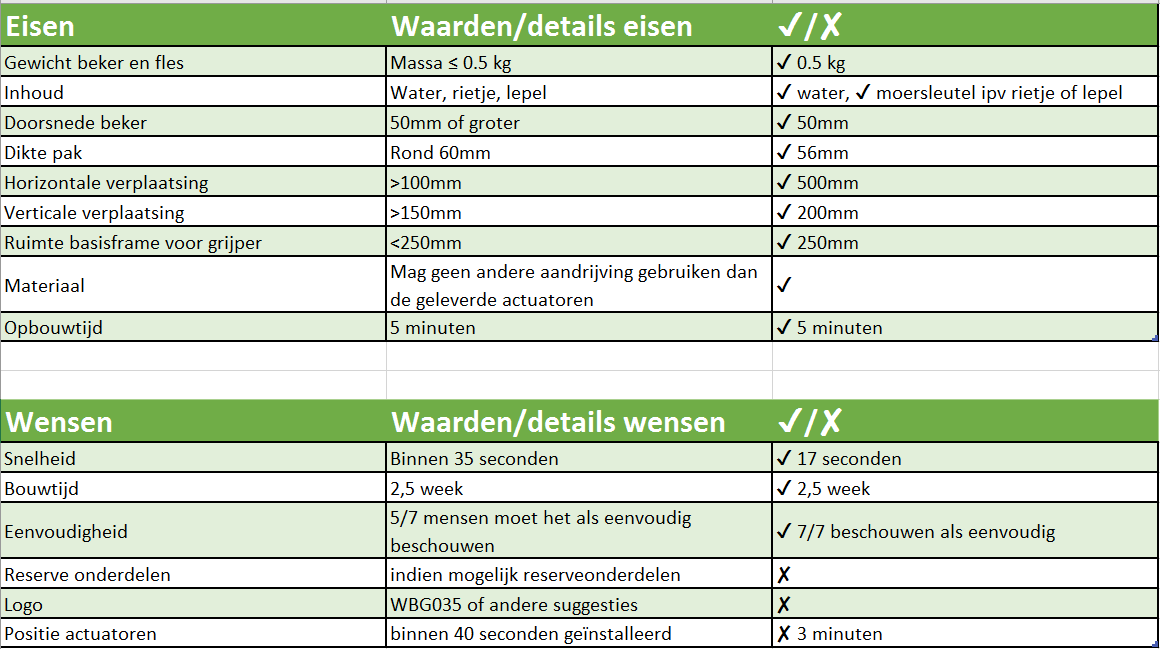
In deze tabel staan de eisen en wensen, samen met de resultaten van de test, alle eisen zijn behaald, en ongeveer de helft van de wensen is ook voldaan. Onder de tabel is het filmpje te vinden wat na vele tests tot stand is gekomen.
Met deze grijper hebben we aan alle eisen voldaan. Onze grijper kan namelijk zowel een fles als een beker met een gewicht van 0.5 kg oppakken. In het bekertje kon zelfs een rietje die tijdens de beweging er niet uit ging. Ook het oppakken van het tetra pak ging zonder moeite, zoals in het filmpje te zien is. De doorsneden van de beker, de fles en het pak waren geen probleem, onze grijper kon ze allemaal oppakken. Het kon zelfs voorwerpen oppakken met hele verschillende doorsneden, zoals een etui, een tas, een jas en zelfs een schoen.
De verplaatsingen gingen ook goed. De eisen waren een horizontale verplaatsing van 100 mm en een verticale verplaatsing van 150 mm. De horizontale verplaatsing is ruim gelukt, de grijper verplaatste zelfs een halve meter! De verticale verplaatsing is wat minder ruim gelukt, maar met een verplaatsing van 200 mm was dit toch ruim voldoende. Bij het teruggaan naar de uitgangspositie, nadat het voorwerp op de verhoging is neergezet, moest er wel op gelet worden dat de grijper langzaam omhoog gaat, omdat anders het voorwerp omgestoten wordt. Dit deden wij door een combinatietang te gebruiken. Met deze kunnen de perslucht slangetjes dicht geknepen worden en zo kan voor een lagere flow gezorgt worden. Dit helpt niet alleen bij de verplaatsingen, maar ook bij het rustig oppakken van verschillende objecten.
Andere eisen waren de beschikbare ruimte van het bord die je mocht gebruiken, alleen een actuator gebruiken voor de bewegingen en de opbouwtijd mocht niet te lang zijn. Ook aan deze eisen zijn allemaal voldaan.
Voor het filmen hebben we een keer getest. De grijper zal toen al in elkaar, het idee werkte maar er kwam veel druk te staan op het parallellogram en het was niet stabiel.Dat kwam doordat we zeskantmoeren hadden gebruikt. Deze komen snel los te zitten als er veel met het systeem gedaan wordt. Dit probleem hebben we opgelost door zelfborgende moeren te gebruiken. Hierdoor werd het parallellogram ook een stuk steviger.
Naast de eisen hadden we ook nog een aantal wensen opgesteld. Wat we zelf heel belangrijk vonden en niet in de eisen stond is de snelheid van de grijpbeweging. Zelf hebben we hier als doel na veel overleg 35 seconde voor genomen, uiteindelijk was de snelste tijd van de grijpbeweging 17 seconden. Ook was het belangrijk om niet iets te willen maken wat te moeilijk was om te fabriceren, het moest wel binnen 2,5 week gebouwd kunnen worden, wat voor ons ontwerp geen probleem was.
Wat we ook erg belangrijk vinden is de eenvoudigheid van de grijper. Hoe eenvoudiger de grijper, hoe minder er fout kan gaan. Voor het vervullen van deze wens moesten 5 van de 7 mensen de grijper eenvoudig vinden. Uiteindelijk was iedereen er over eens dat dit best een simpel model was, vooral nadat we modellen van andere groepen gezien hadden.
Helaas hebben we niet al onze wensen gerealiseerd. Het maken van reserveonderdelen bleek uiteindelijk onmogelijk, omdat we maar één plaat van perspex kregen en we bijna de hele plaat nodig hadden voor de onderdelen. De enige reserveonderdelen die we hadden waren elastieken, omdat elastieken makkelijk kunnen breken. Ook is het ons niet gelukt om de actuatoren binnen 40 seconden te installeren, dit bleek wel in 3 minuten mogelijk te zijn. Tijdens de battle krijg je hier 5 minuten voor, dus dit moet zeker goed komen.
Als onze groep wordt gekozen voor de battle, hebben we nog een aantal verbeteringen. Het grootste nadeel aan ons huidige ontwerp is dat we met een tang werken om ervoor te zorgen dat de beweging rustig verloopt. We kunnen hiervoor nog ventielen gebruiken, waardoor de flow altijd minder wordt. Met een tang kan het nog wel eens mis gaan als iemand per ongeluk de verkeerde persluchtslang dichtknijpt of als er te veel of weinig druk op te slang gezet wordt. Hierdoor krijgen we nog meer controle over onze grijper en zal de beweging nog soepeler gaan. We gaan tijdens de battle geen ventielen gebruiken, maar het zou wel een verbetering kunnen zijn voor het ontwerp. Tijdens de battle zullen er meerdere mensen zijn die de buisjes dicht gaan knijpen met tangen, hierdoor verwachten we tijd te winnen.
Ook het in elkaar zetten van de grijper gaat steeds sneller, omdat we nu goed weten wat we moeten doen, maar we kunnen het draadeind nog veilen om ervoor te zorgen dat het er op draaien van de moeren nog makkelijker gaat. Hierdoor kunnen we de grijper nog sneller in elkaar zetten en zal dit bij de battle ook geen probleem worden. We verwachten hiermee ongeveer een minuut tijd te winnen.






Het mooiste van het project is natuurlijk het eindresultaat, wat alleen nog maar mooier is als het werkt natuurlijk. Maar ook het proces is een belangrijk aspect, wat ondanks de vele deadlines en uitdagende opdrachten soepel verlopen is. Dit komt vooral door de goede samenwerking, en gewoon lekker doorwerken natuurlijk.
Matto Leeuwis
Met dit project heb ik nieuwe mensen ontmoet en gewerkt aan een nieuw project om dit binnen de deadline te halen. Hierbij heb we moeten samenwerken en opdrachten onderverdelen om onze deadline te kunnen halen. Het was niet alleen zeer leerzaam maar ook erg leuk om dit project met deze projectgroep te doen.
Karan Kohabir
Ik vond het een leuk project om aan te werken, vooral met deze groep, de samenwerking was uitstekend. Wat ik vooral van dit project heb geleerd zijn de verschillende ontwerpstappen die nodig zijn om tot een definitief idee te komen. Dit gaat zeker van pas komen bij toekomstige projecten!
Kevin van Kesteren
Het project was een erg gezellige tijd, waarin we goed samen leerden werken en uiteindelijk ook een goed eindresultaat kregen. Ik vond het vooral leuk om te zien hoe je de ideeën van de groep ook echt kan omzetten naar een werkend bouwtuig die aan de eisen voldoet.
Robin Koerts
Als notulist van de groep heb ik een goed beeld gekregen van de potentie die wij hebben. De samenwerking tussen de deelnemers was uitstekend, want elk individu heeft een belangrijke bijdrage gedaan voor het ontwerpproces en daar ben ik erg trots op!
Chihao Kuo
Tijdens dit project was ik de voorzitter tijdens de vergaderingen. Dit was een nieuwe ervaring voor mij en heel leerzaam. De groep is gezellig en op de goede momenten ook erg productief. Ik ben ook erg tevreden over het eindresultaat.
Joris Kuiper
Wij hebben een leuke groep die door de weken heen steeds beter leerde samenwerken. Over het eindresultaat mogen we tevreden zijn, de grijper werkt en (bijna) alle eisen en wensen zijn voldaan. Ik ben er blij mee om samen met deze groep de tijd en energie in dit project te hebben gestoken.
Pieter Lok