Theoretische analyse grijparm
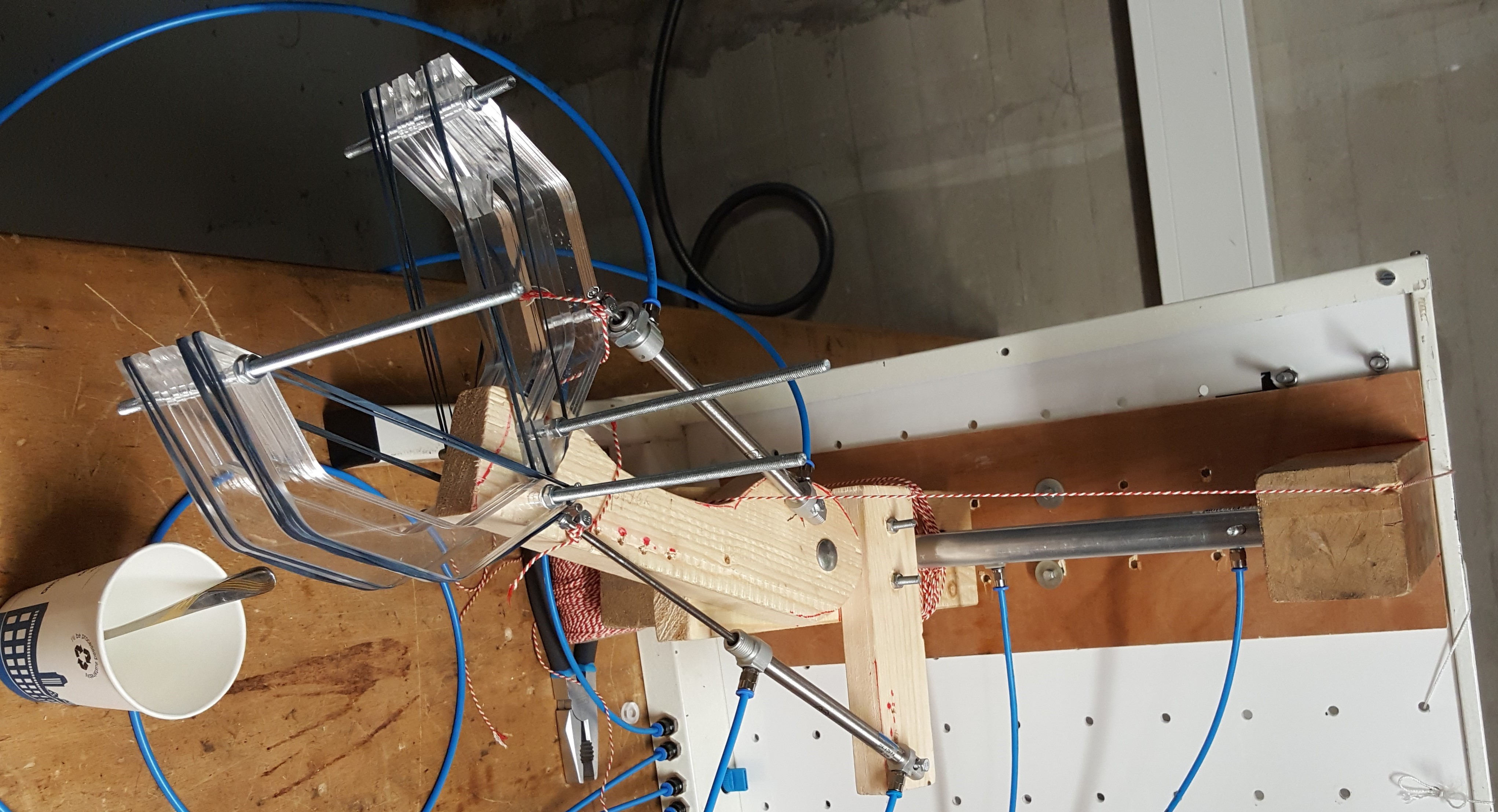
Railgeleiding
Voor de verticale verplaatsing is in het ontwerp gekozen voor een metalen 'rails' met een verticaal georiënteerde actuator om de gehele grijparm verticaal te transleren.
Dit heeft als voordeel onafhankelijkheid van beweging en het verminderen van ongewenste bewegingsvrijheden. Doordat de grijper in zijn geheel verticaal transleert, zonder verder veranderingen in oriëntatie, hoeven er geen verdere correcties gemaakt te worden aangaande de hoogte van de grijper, tijdens verdere operaties van de arm. Verder, worden doordat een ronde rails slechts één vrijheid van rotatie kent, onnodige rotaties om de andere 2 assen direct onmogelijk gemaakt.
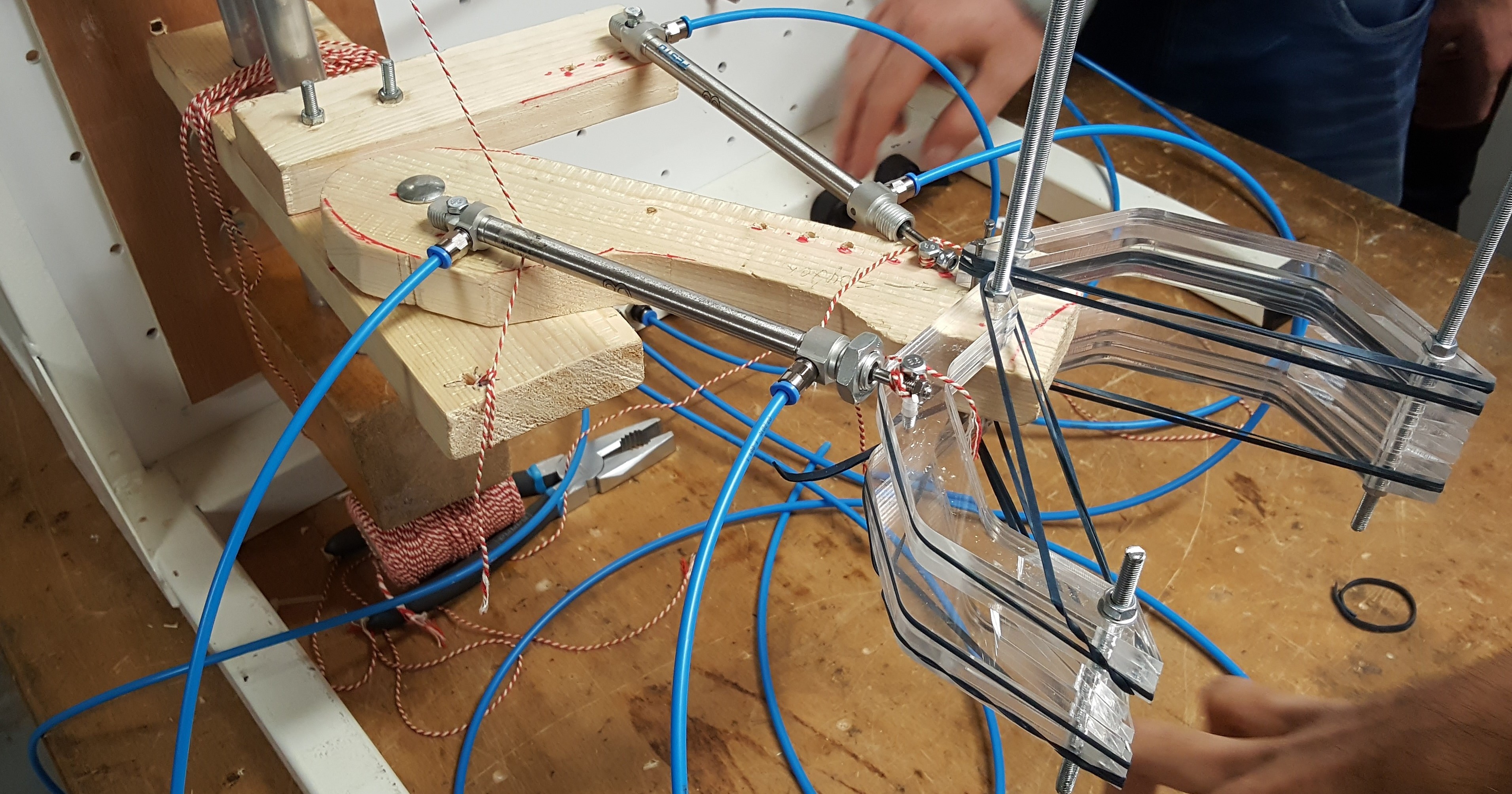
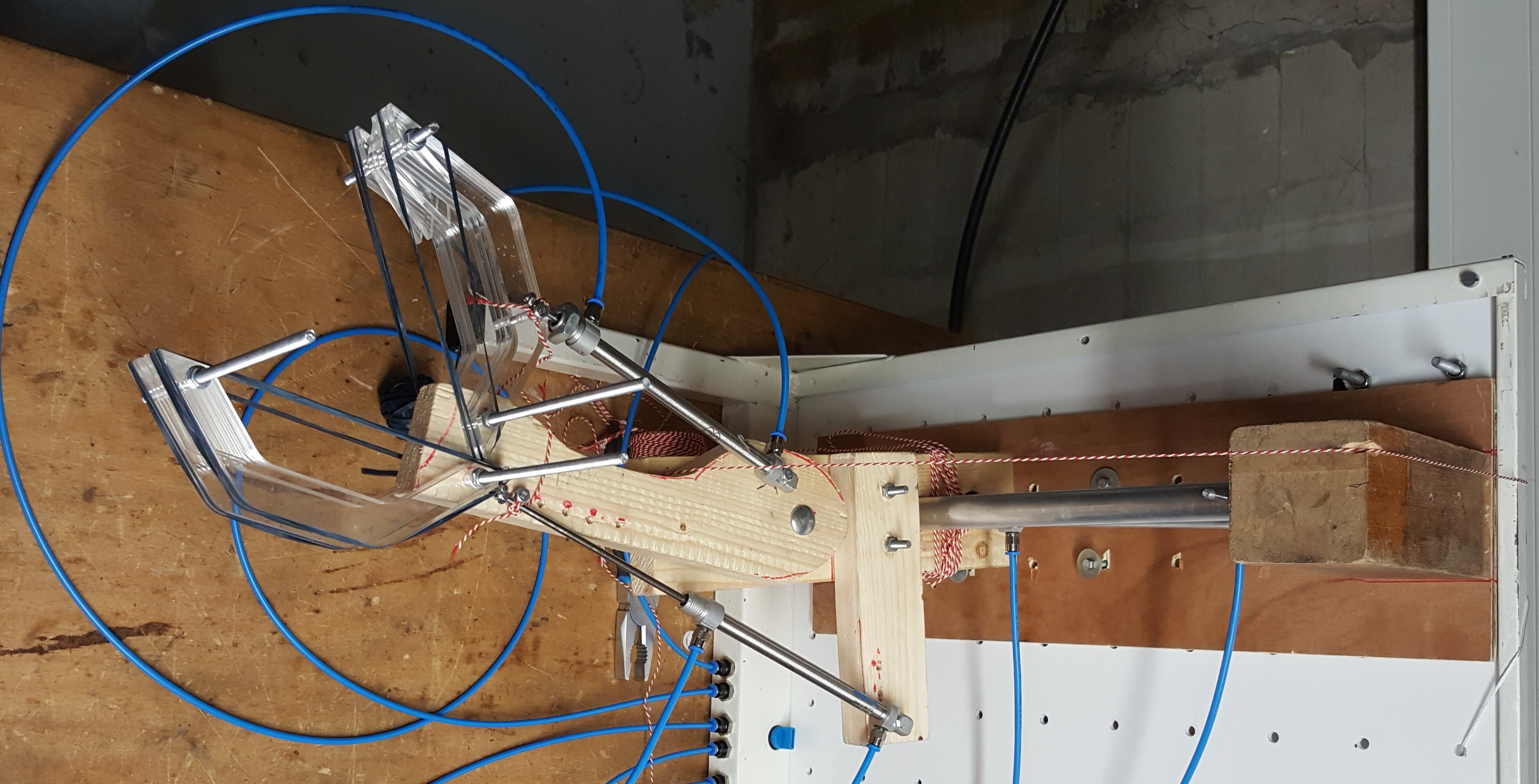
Lengte en constructie hoofdarm
Preliminaire berekeningen toonden aan dat de afstand waarover de grijper moet opereren, en daarmee de lengte van de grijper, zo klein zijn dat zelfs een zeer kleine houten constructie al vele malen sterker is dan noodzakelijk om de krachten te dragen. Omdat voor de grijparm betrouwbaarheid een hogere prioriteit heeft dan een klein gewicht, is het acceptabel als de hoofdarm (of andere onderdelen) vele malen sterker is dan noodzakelijk. Voor de hoofdarm zijn verder dan ook geen specifieke eisen meer gesteld; deze hoefde slechts minimaal 20 cm te zijn en moest achterin een bevestigingspunt voor de zijwaartse actuator bevatten.
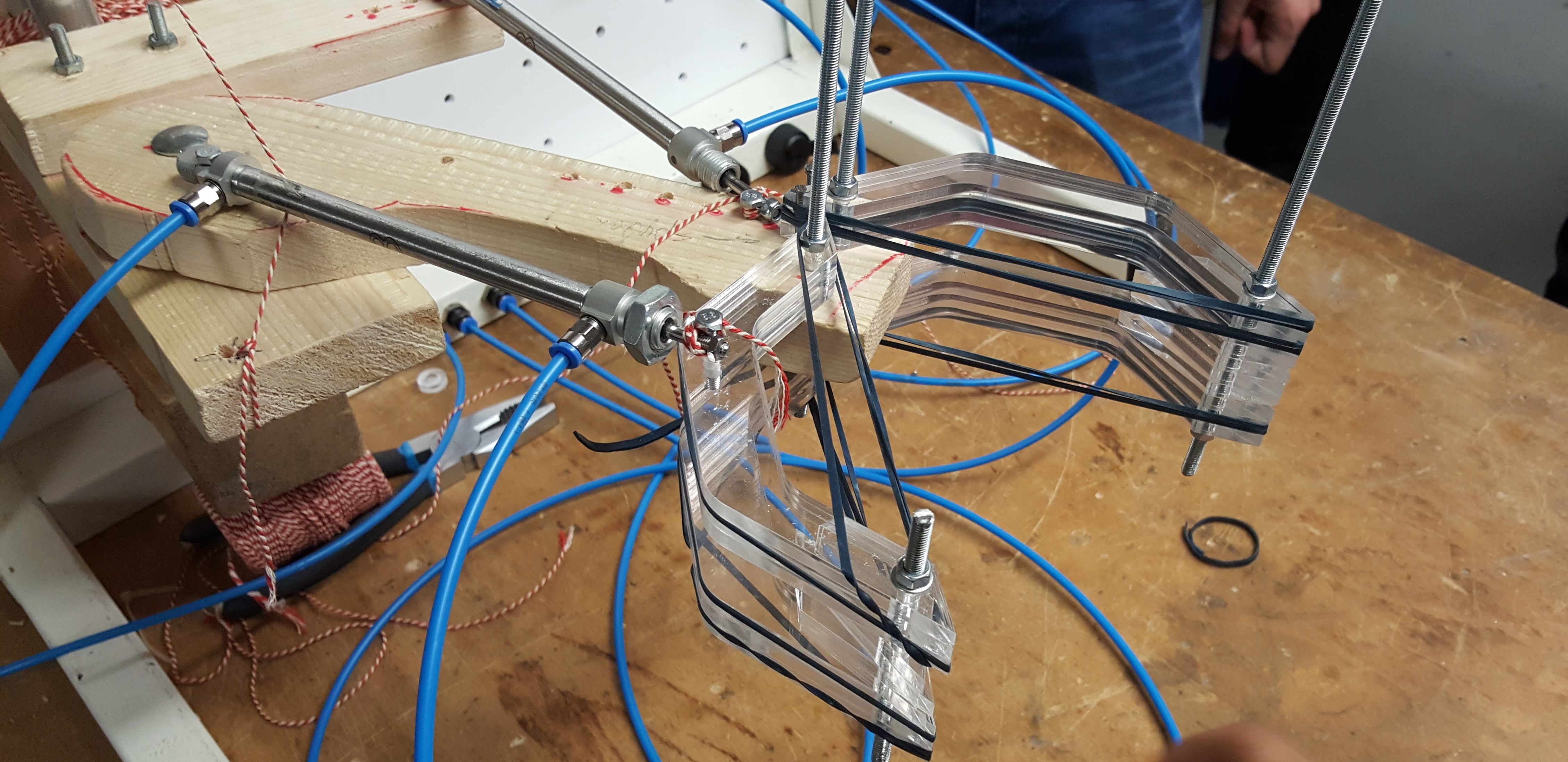
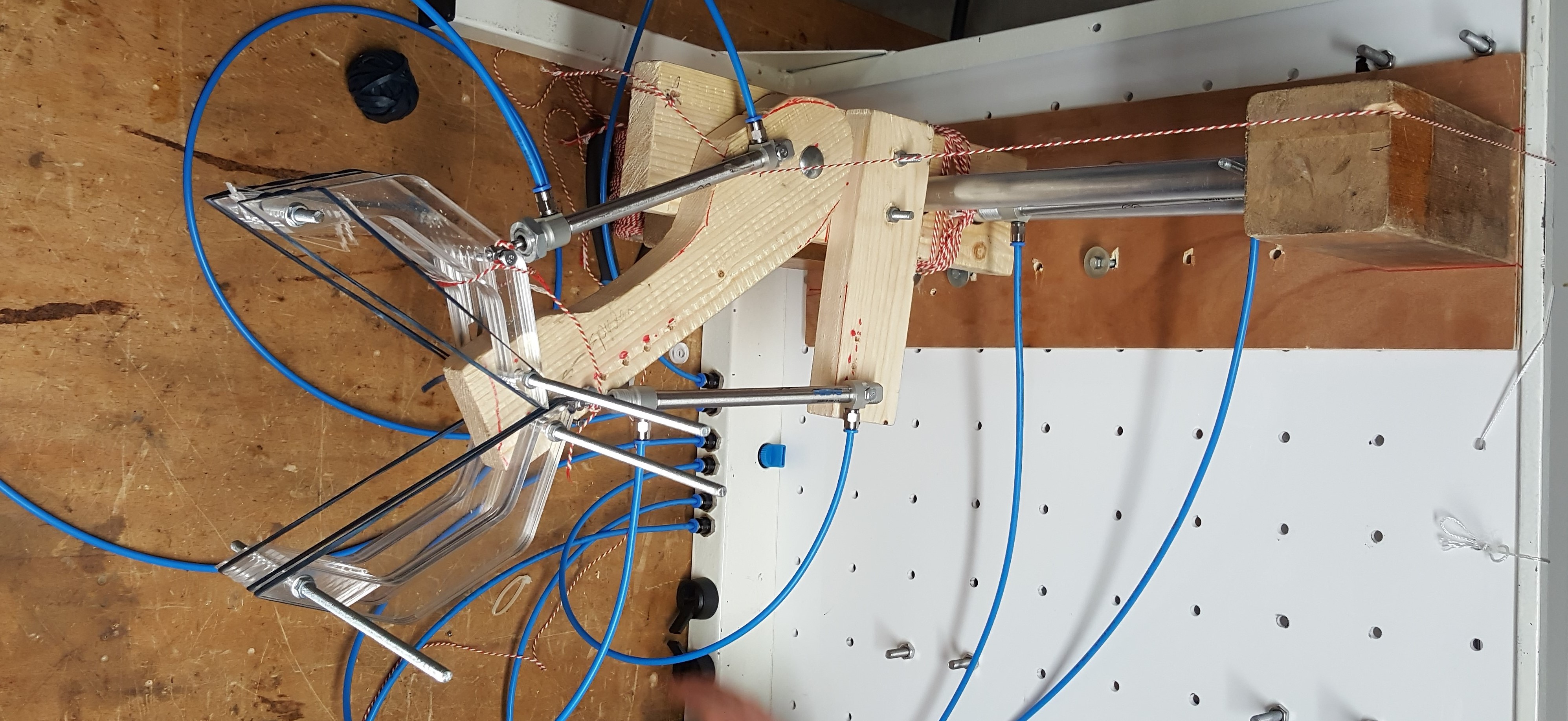
Grijper
Voor de grijper is een nog hogere nadruk gelegd op een algeheel robuuste constructie. Dit omdat, waar de andere actuatoren relatieve zware armen en onderdelen moeten bewegen, de grijper vrij licht is en door de hoge acceleratie van de actuator, grote stress te verduren kan krijgen.