Eindresultaat
De uiteindelijke grijper voldeed niet aan het originele plan, hij werkte niet zoals het bedoeld was. De grijper kwam scheef te staan en er werd te weinig kracht geleverd door de actuatoren om het grijp-gedeelte omhoog te krijgen. Onze grijper heeft een groot frame gekregen om de grijper vanaf boven te kunnen laten werken. Het maken van dit frame kostte echter veel meer tijd dan nodig was. Hierdoor zijn we te laat begonnen aan het maken van het grijp-gedeelte en hebben we vrijwel zonder de actuatoren getest. Vanaf het moment dat we ons uiteindelijke model hadden gekozen zijn we in de werkplaats geweest om de onderdelen uit te werken. We hebben alle onderdelen in elkaar gezet zonder erover na te denken hoe en waar deze gemonteerd moesten worden aan de andere onderdelen. Dit zorgde meerdere malen voor problemen en onnodig veel extra tijd in de werkplaats.
Er was gezamenlijk voor gekozen om heel veel met hout te realiseren. Niemand van ons had echt veel ervaring met het bewerken van hout. Het tempo lag daardoor redelijk laag en de netheid van het werk was niet altijd van goede staat. In de een na laatste mogelijkheid in de werkplaats stootten we op de laatste problemen. Alle onderdelen zaten inmiddels in elkaar en er was een begin gemaakt met deze aan elkaar zetten. Dit was het moment dat we erachter kwamen dat we iets heel erg essentieels waren vergeten, de inbouw plaatsen van de actuatoren. Er was nog maar heel weinig tijd over dus zijn de actuatoren snel en slordig ingebouwd. Tijdens het testen liep dit dan ook op meerdere plekken vast.
De uiteindelijke grijper was in staat om de horizontale beweging te maken zonder al teveel moeite. Daarna had het Nuremberg-systeem moeten zakken en de grijper had om de beker moeten klemmen. Voor het klemmen was veel meer kracht nodig dan er was ingeschat van te voren. De grijpvingers kwamen door het kracht tekort niet ver genoeg om de beker in te sluiten en er tegenaan te klemmen. Het was vanaf dit moment al onmogelijk een werkende grijper te maken.
Het Nuremberg-systeem had daarna de grijper met beker recht omhoog moeten tillen. De grote actuator kon echter ook niet genoeg kracht leveren en trok het systeem maar half omhoog. Dit verliep in tegenstelling tot de verwachte rechte beweging ook niet goed. Het systeem trok zichzelf scheef en doordat het scheef stond werd de horizontale beweging, die eerst nog goed verliep, ook geblokkeerd.
Gemaakte fouten tijdens het project
Eisen opstellen:
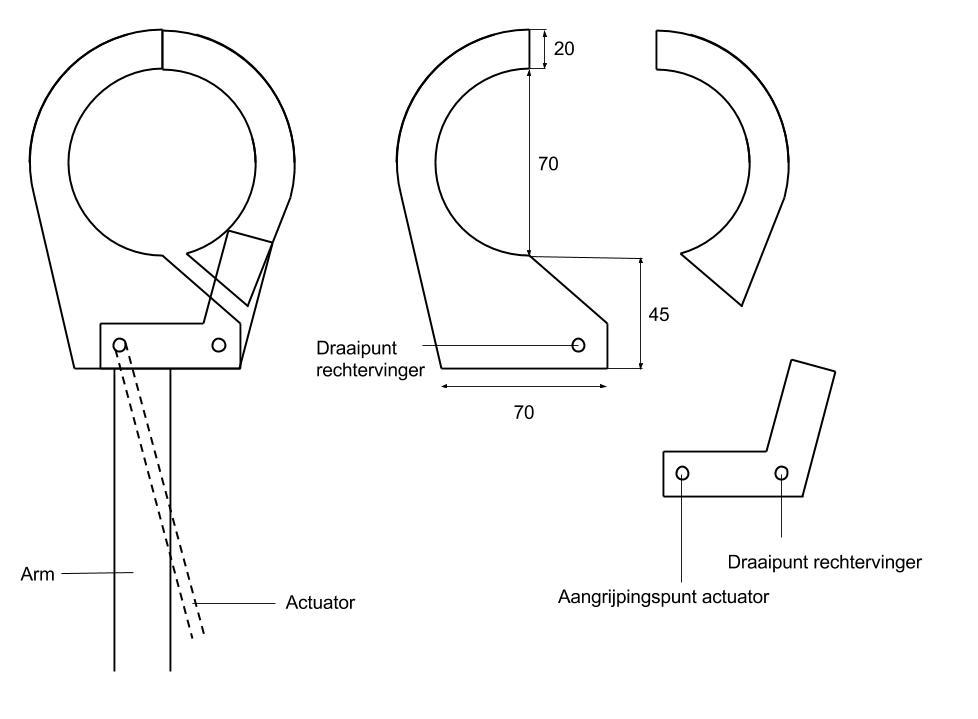
Tijdens het opstellen van de eisen hebben wij de lengte, uitschuifvermogen en het gewicht van de
actuatoren niet in ons eisen genomen. Vanuit incomplete eisen hebben wij een functionerend
prototype gemaakt. Dus hebben wij geen rekening gehouden met de uitschuiflengte van de actuator
voor onze verticale beweging. Bovendien als wij de actuator bevestigen aan onze grijper zoals wij
hadden bedacht, wordt ook het krachtevenwicht van de grijper verstoord. Als resultaat heeft de
grijper een vreemde hoek gekregen in plaats van dat het loodrecht boven het voorwerp hing.
Het maken van het prototype:
Wij hebben het prototype in een korte tijd gebouwd en het functioneerde ook zoals wij hadden
verwacht. Daardoor zagen wij het te snel als een succesvol ontwerp, maar wat wij niet hebben
gedaan is de situatie zoveel mogelijk laten lijken als de situatie van het eindproduct. Bijvoorbeeld
door middel van een lang voorwerp te bevestigen op het prototype, zodat wij inderdaad konden zien
dat de actuator niet in de weg stond van ons systeem, wat uiteindelijk dus wel gebeurde.
Productie:
Een andere fout die wij hebben gemaakt is de materiaalkeuzen en de bijbehorende
productietechnieken. Vanuit de overweging van de kosten en de gemakkelijkheid van het verwerken
hebben wij een groot deel van de grijper van hout gemaakt. Het probleem hiervan is dat hout
onvoldoende stevigheid heeft bij een dunne dikte. Om voldoende stevigheid te hebben, hebben wij
dikte van ongeveer 1,5 cm gekozen. Het gevolg hiervan is dat de grijper veel groter geworden is dan
onze origineel ontwerp, waardoor wij een aanzienlijk grotere kracht nodig hadden in de verticale
beweging. Daarnaast zijn er veel onnauwkeurigheden opgetreden tijdens de productie. In onze
krachtanalyse gingen wij er van uit dat alle vingers symmetrisch waren, maar het product dat wij
gemaakt hebben, heeft op vele plekken onnauwkeurigheden van 3 tot 7 mm. Door dit verschil kreeg
onze grijper extra wrijving en een onverwachtse krachtverdeling. Uiteindelijk kwam het er op neer
dat de actuator onvoldoende kracht kon leveren om het voorwerp op te tillen.